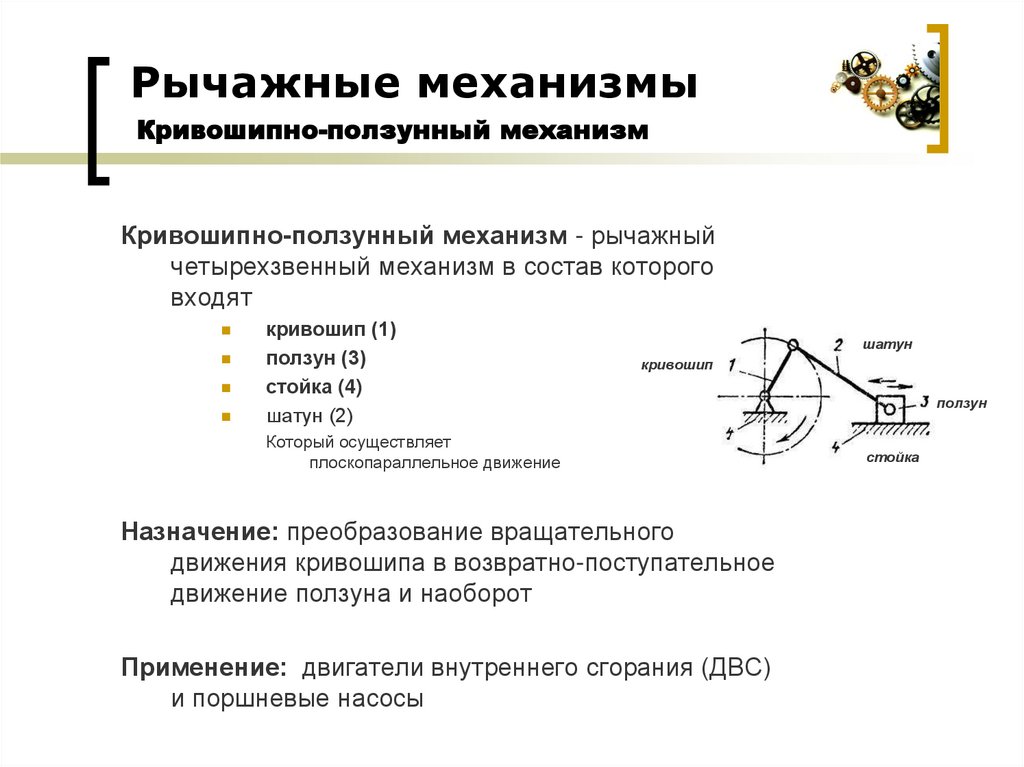
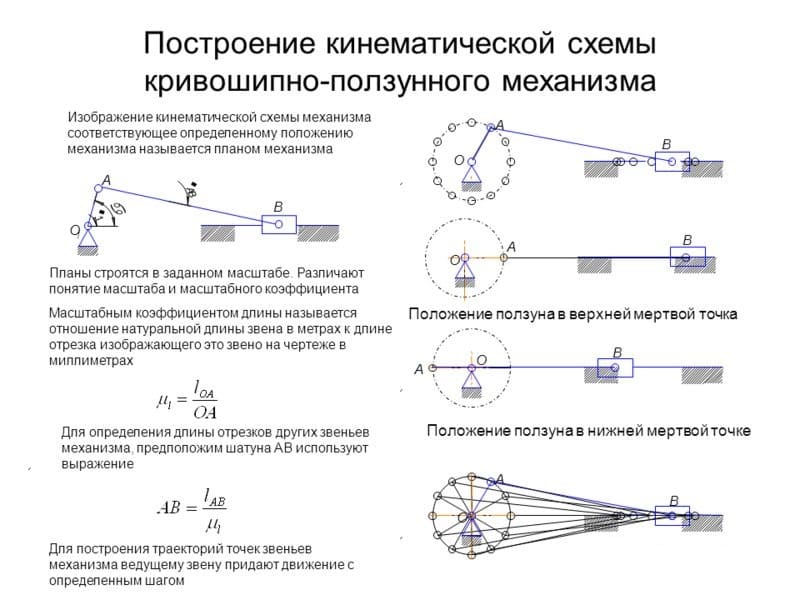
Построение КПМ
Построение эффективно работающих кривошипно- ползунных устройств, несмотря кажущуюся простоту их конструкции, требует большой расчетной и конструкторской работы.
В ее ходе учитывают такие моменты, как:
- эффективность и коэффициент полезного действия;
- рациональное использование материалов, оптимальные весогабаритные характеристики;
- финансовые параметры производства и использования устройства;
- надежность и периодичность технического обслуживания;
- точность работы и виброактивность;
- безопасность и охрана труда.
Поскольку перечисленные аспекты взаимосвязаны и влияют друг на друга, проектирование ползунного четырехзвенного механизма представляет собой многоэтапный итеративный процесс. Зачатую конструктору приходится возвращаться на более ранний этап проектирования рычажного механизма и уточнять параметры схемы по результатам расчетов на более поздних стадиях процесса.
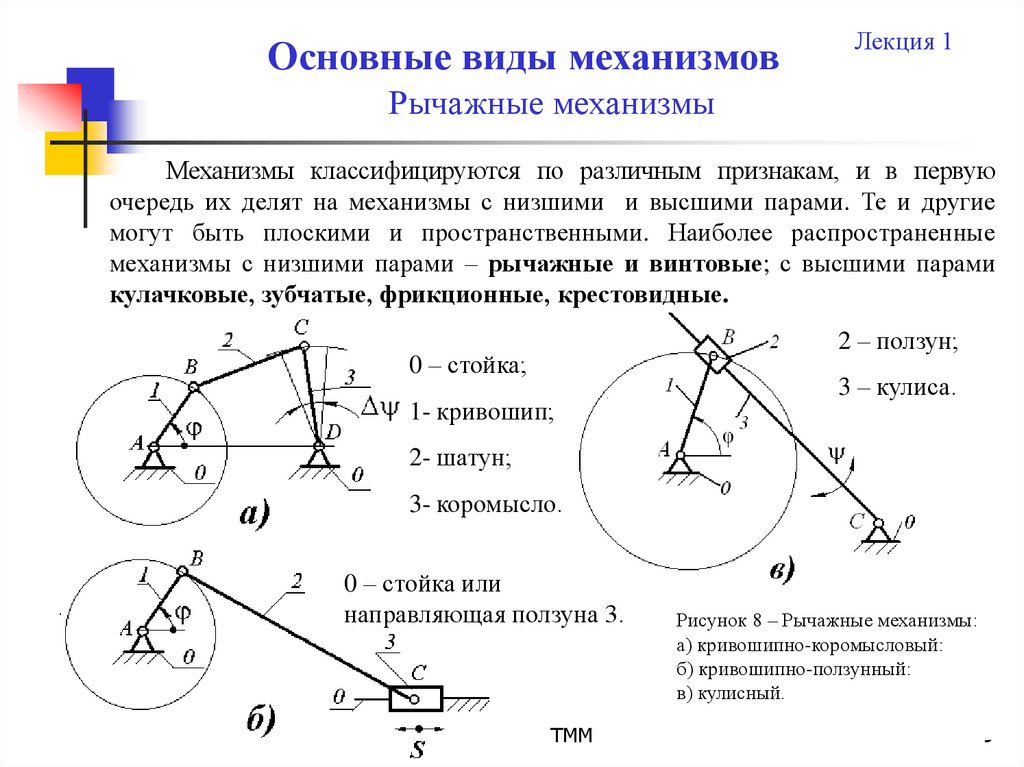
Иногда даже приходится менять вид кривошипно- ползунного механизма. В высокооборотных дизелях требуется снизить скорость движения поршня на некоторых фазах рабочего цикла. Как правило, это требуется при прохождении верхней части цилиндра, чтобы обеспечить более полное сгорание топливной смеси. Для этого применяют дезаксиальную схему кривошипно-ползунного устройства. В ней оси цилиндров расположены со смещением смещена относительно оси коленвала на некоторое расстояние по ходу вращения.
В ней прицепного шатун бокового цилиндра сопряжен с шатуном главного цилиндра. Это позволяет снизить вес, размеры и момент инерции части подвижных звеньев.
Построение включает в себя такие расчетно- модельные процедуры, как:
- кинематический расчет, оптимизация числа кинематических пар;
- силовое моделирование;
- статический расчет, включая уравновешивание.
Обязательным этапом является проверка на соответствие нормам безопасности и охраны труда.
Традиционный расчет и построение такого сложного механизма, как кривошипный, представляет собой трудоемкий процесс, требующий от конструктора внимательности и достаточного опыта. Современные элементы программных продуктов семейства CAD — CAE позволяют избавиться от большей части рутинных и однообразных ручных операций, графических построений и расчетов. Конструктору достаточно выбрать из библиотеки трехмерную модель того или иного типа кривошипно- ползунной пары и провести параметрическое моделирование, задав необходимые размеры. Модуль графической симуляции проведет и статическое уравновешивание, и кинематический расчет, и выдаст рекомендации по оптимизации звеньев.
https://youtube.com/watch?v=hQLAZ0dcWMs
Правила работы с грузоподъемными машинами и механизмами
К работе по подъему грузов допускаются агрегаты, у которых есть зарегистрированный допуск к эксплуатации. Документ оформляется на основании комплекса проведенных испытаний. Оператор должен иметь соответствующую техническую подготовку, пройти инструктаж
Особое внимание уделяется грамотной фиксации подвешенной конструкции, подъёмного навесного механизма
При отсутствии постоянного крепления контроль положения во время перемещения выполняется напрямую стропальщиком, оператором, грузчиком. Для слаженной работы каждого из специалистов в условиях действующей стройки или производства часто используются заранее оговоренные сигнальные жесты.
В отдельных случаях возникает необходимость в дополнительной защите подвешенного товара от возможных повреждений, механических воздействий (особенно часто такие ситуации происходят при работе с веществами, которые представляют повышенную химическую, врыво-, пожароопасность). При автоматизации техники алгоритм движения зависит от параметров и свойств материала, особенностей технологического процесса.
Техника безопасности
Стандартные требования безопасности в работе с грузоподъёмными механизмами вне зависимости от их конструктивных особенностей и сферы использования – допуск лиц старше 18 лет в спецодежде, средствах индивидуальной защиты после прохождения обучения, инструктажа, сдачи экзаменов на наличие необходимых для выполнения поставленных задач навыков. Также необходимо выполнить следующие действия:
- проверить исправность узлов агрегата, приспособлений для захвата;
- убедиться в том, что уровень освещения достаточен для работы;
- использовать для обвязки стропы, которые соответствуют по своим параметрам весу перемещаемых конструкций;
- транспортировку мелких товаров выполнять в контейнере;
- не оставлять подвешенными конструкции на время перерыва;
- не допускать поднятия конструкций, которые примёрзли к земле, забетонированы, засыпаны землёй;
- выдерживать при подъёме минимум 0,5 м до самой высокой точки стационарных конструкций по траектории движения;
- не допускать перемещения над людьми.
https://youtube.com/watch?v=ajxYWhGmuHA
После окончания выполнения запланированных работ крюк поднимают, выключают рубильник. Грузозахваты убирают в место, предназначенное для хранения. При выявлении любых неисправностей, о них сообщают сменщику или мастеру цеха.
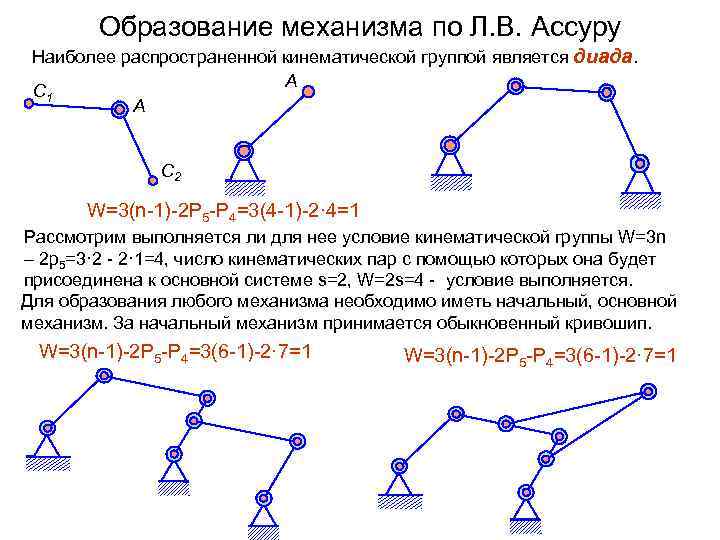
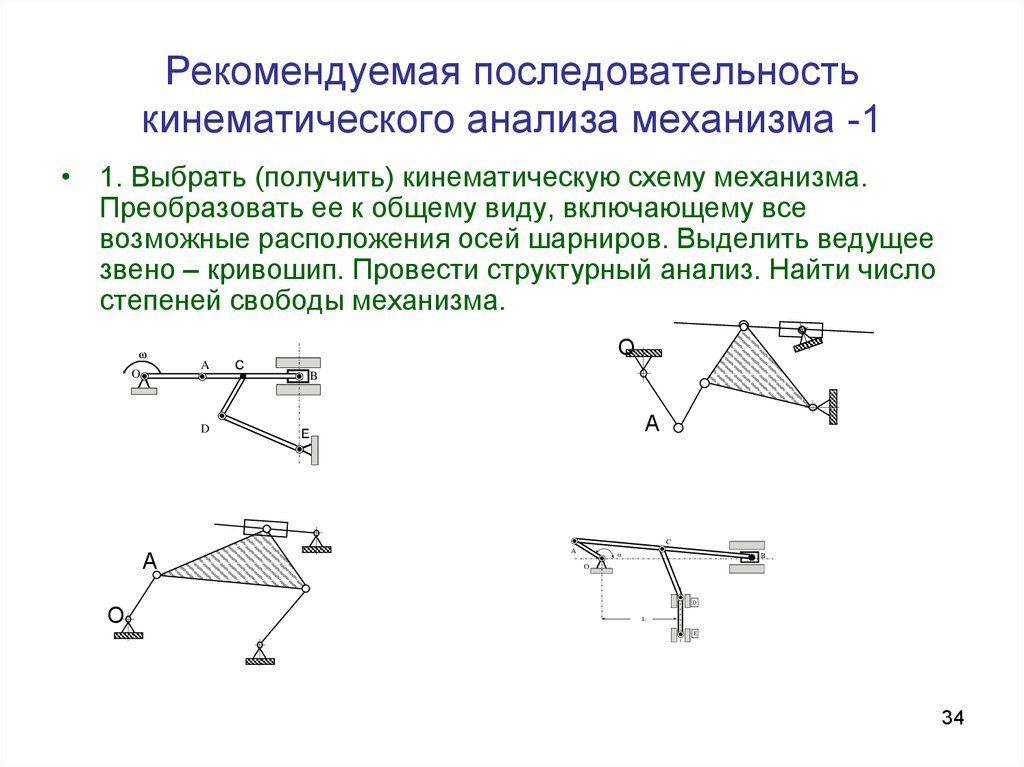
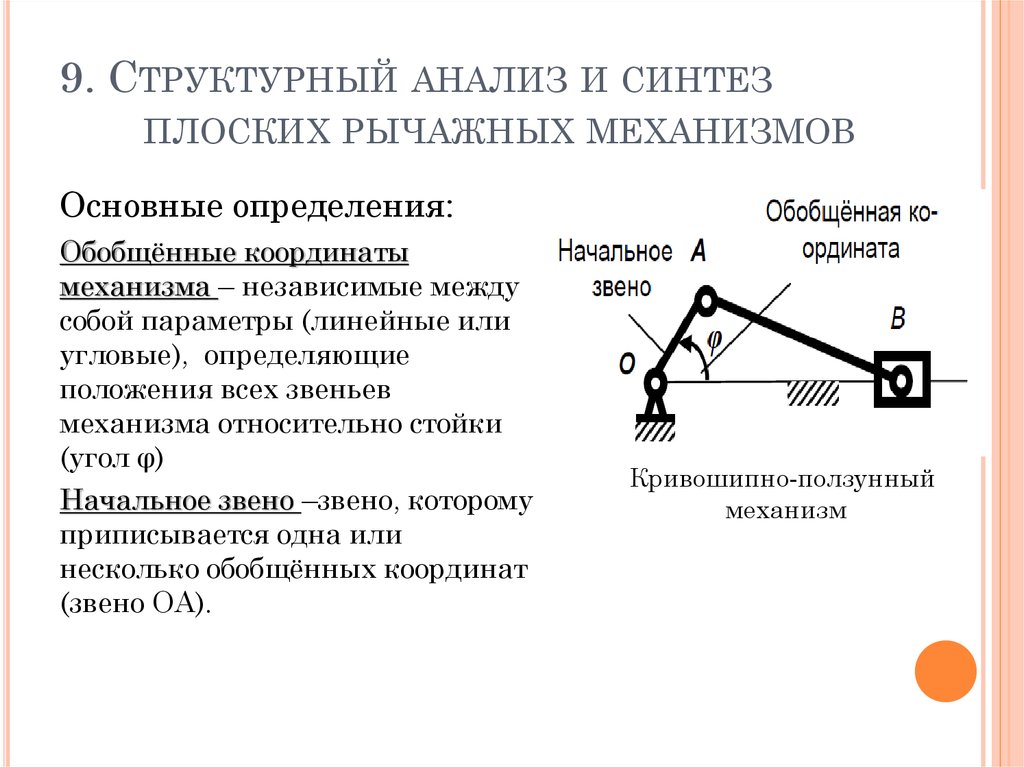
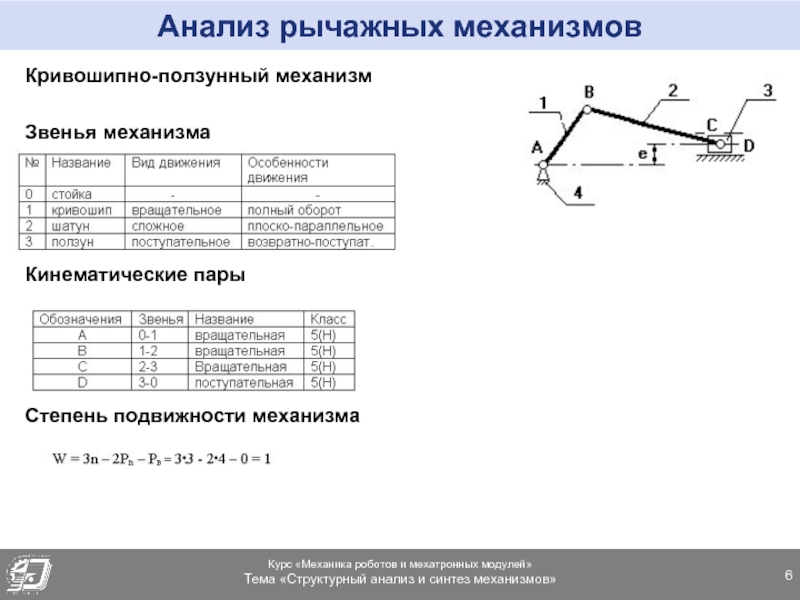
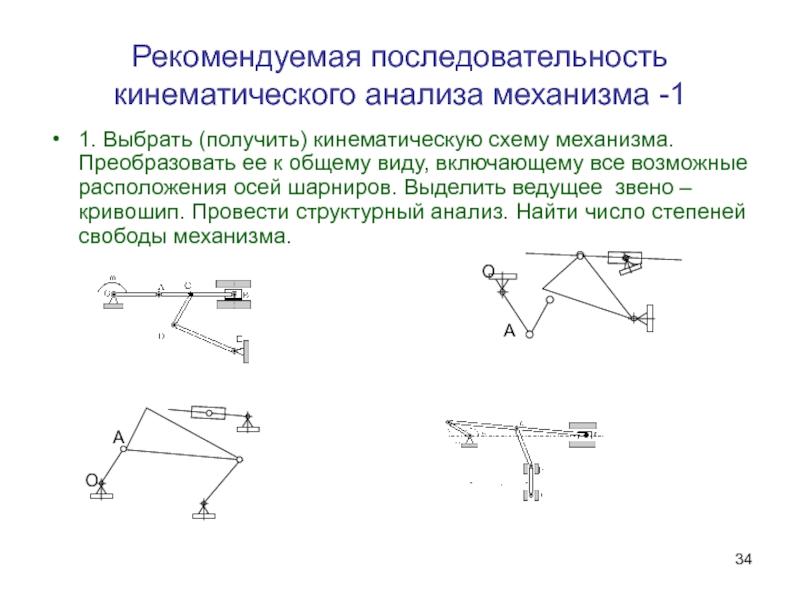
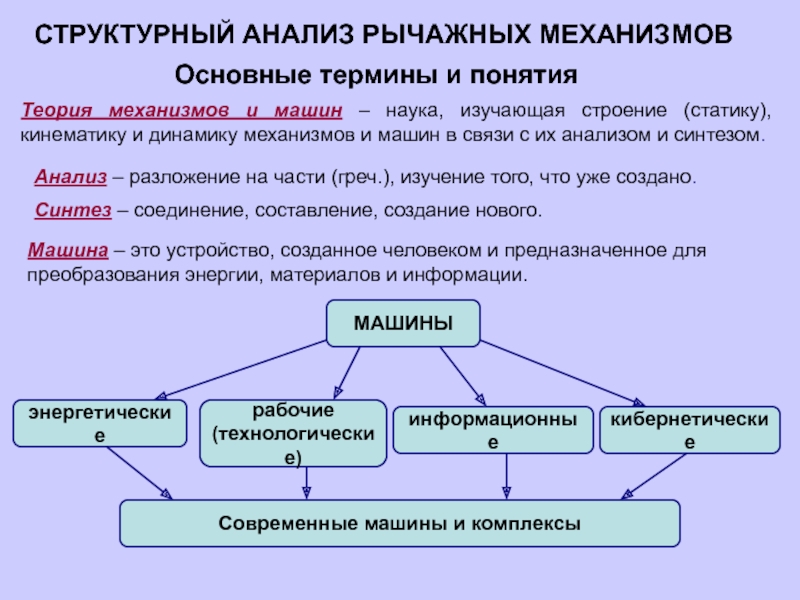
Структурный анализ рычажных механизмов
Проводя исследование рычажного механизма следует уделять внимание возможности выбора двух основных направлений, одно из которых связано с непосредственным анализом, другой синтезом. Оба понятия существенно отличаются друг от друга, что нужно учитывать
Структурный анализ – процесс определения структурных особенностей, который может заключаться в следующем:
- Определении кинематической пары.
- Изучение структур групп.
- Определение особенностей связи кинематической цепи.
Сегодня анализ проводится для определения дефектов структуры, которые в дальнейшем при необходимости могут устраняться.
Каждый случай исследования по-своему уникален
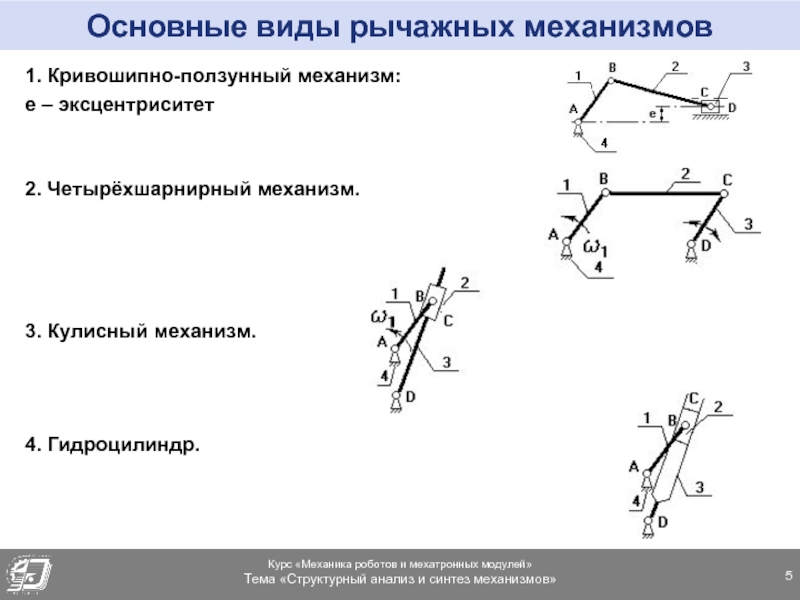
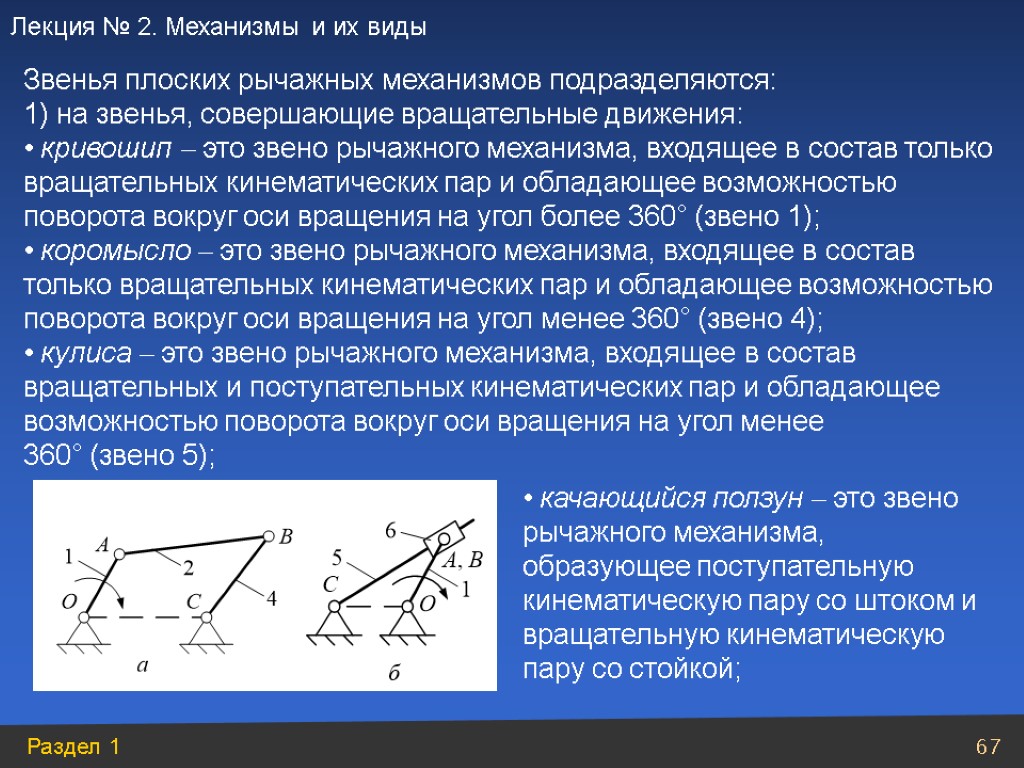
В рассматриваемом случае уделим внимание плоскому рычажному механизму, характеризующийся нерациональной структурой. Его особенности заключаются в нижеприведенных моментах:
- Работоспособность механизма сохраняется исключительно при определенном соотношении длины звеньев. Образующаяся фигура в ходе построения напоминает параллелограмм.
- Для исключения вероятности эксплуатации устройства с дефектами следует точно знать о наличии или отсутствии избыточных взаимосвязях, возможности пассивного распространения и их количества. Стоит учитывать, что они могут возникать исключительно в кинематических цепях замкнутого контура.
- На сегодняшний день выделяют два основных типа контуров: замкнутые и зависимые. Независимым считается вариант исполнения, у которого хотя бы один элемент контура отличается от других.





Зависимые варианты исполнения дублируют друг друга. Для определения числа контура применяется специальная формула.
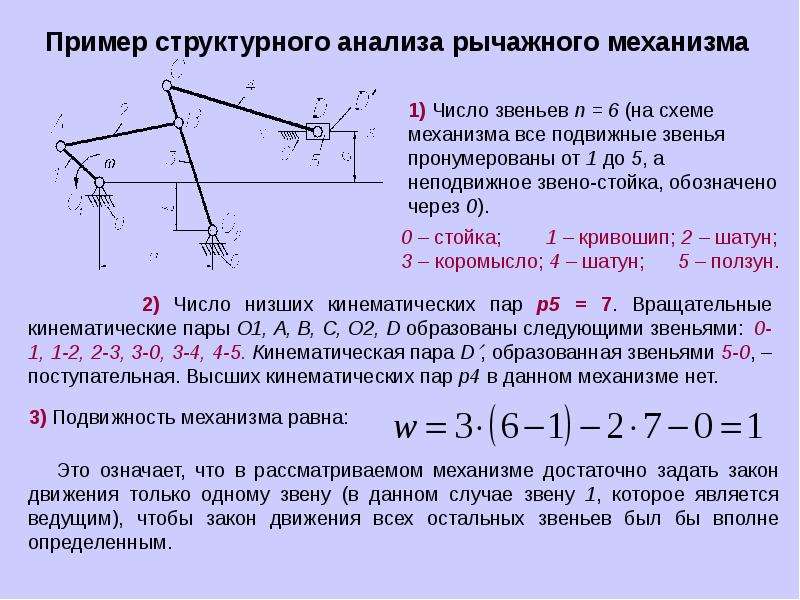
Также для исключения вероятности появления дефекта проводится расчет количества структурных групп и некоторые другие моменты. В общем можно сказать, что проводимый анализ направлен на достижение следующих задач:
- Построение различных механизмов. При этом проводится определение подвижности и маневренности, так как подобные параметры считаются основными.
- Создание плоских механизмов. Процедура подразумевает анализ состава структуры, а также определяет подвижности.
В целом можно сказать, что преследуемые цели зачастую направлены на определение возможной деформации структуры. Провести полноценный анализ можно только при всестороннем рассмотрении механизма.
Возможные проблемы и важные особенности
При работе рассматриваемого механизма велика вероятность возникновения самых различных проблем. Примером можно назвать проскок положения максимума и многие другие. Для предотвращения проблем следует:
- Проводить своевременное обслуживание.
- Соблюдать технику безопасности.
- Выполнять периодическую замену различных деталей.
Также следует уделять внимание тому, какой период смазки коленно-рычажного механизма. Только при своевременной подаче смазывающего вещества можно существенно снизить степень износа основных элементов
Стоит учитывать, что для рассматриваемого рычажного механизма требуется специальная жидкость, обладающая особыми свойствами.
Проскок положения максимума
Как выше было указано, довольно большое распространение получил случай проскока положения максимума. Среди особенностей этого момента отметим следующее:
- На момент, когда все три шарнира находится на одной линии оказывается наибольшее усилие смыкания.
- В данном положении шток вытянут максимально, неосторожные действия могут стать причиной повреждения конструкции.
- Если конструкция была настроено неправильно, то серьги проскакивают положение крайней точки. Подобное явление становится причиной, по которой шток не может вернуться в первоначальное положение.
На момент максимального перемещения штока оказывается сильное давление, за счет чего возникает вероятность деформации основных элементов. Именно поэтому проскок положения максимума приводит к механическому повреждения станка.
Оверлок
Проблема может возникать также в случае неправильной регулировки рычажного механизма. Примером можно назвать случай, когда усилия цилиндра недостаточно для открытия основных элементов. Особенности проблемы следующие:
- На колонны в большинстве случаев надеваются ленточные нагреватели.
- За счет нагрева до определенной температуры происходит удлинение колонны, за счет чего снижается степень оказываемой нагрузки.
В подобном случае запрещается открывать форму до полного открытия колонн. Это связано с тем, что возникающая нагрузка может стать причиной деформации направляющих элементов. Если они потеряют свою форму, то в дальнейшем существенно усложниться ход подвижных элементов.
Структурный анализ рычажных механизмов
Проводя исследование рычажного механизма следует уделять внимание возможности выбора двух основных направлений, одно из которых связано с непосредственным анализом, другой синтезом. Оба понятия существенно отличаются друг от друга, что нужно учитывать
Структурный анализ – процесс определения структурных особенностей, который может заключаться в следующем:
- Определении кинематической пары.
- Изучение структур групп.
- Определение особенностей связи кинематической цепи.
Сегодня анализ проводится для определения дефектов структуры, которые в дальнейшем при необходимости могут устраняться.
Каждый случай исследования по-своему уникален
В рассматриваемом случае уделим внимание плоскому рычажному механизму, характеризующийся нерациональной структурой. Его особенности заключаются в нижеприведенных моментах:
- Работоспособность механизма сохраняется исключительно при определенном соотношении длины звеньев. Образующаяся фигура в ходе построения напоминает параллелограмм.
- Для исключения вероятности эксплуатации устройства с дефектами следует точно знать о наличии или отсутствии избыточных взаимосвязях, возможности пассивного распространения и их количества. Стоит учитывать, что они могут возникать исключительно в кинематических цепях замкнутого контура.
- На сегодняшний день выделяют два основных типа контуров: замкнутые и зависимые. Независимым считается вариант исполнения, у которого хотя бы один элемент контура отличается от других.
Зависимые варианты исполнения дублируют друг друга. Для определения числа контура применяется специальная формула.

Также для исключения вероятности появления дефекта проводится расчет количества структурных групп и некоторые другие моменты. В общем можно сказать, что проводимый анализ направлен на достижение следующих задач:
- Построение различных механизмов. При этом проводится определение подвижности и маневренности, так как подобные параметры считаются основными.
- Создание плоских механизмов. Процедура подразумевает анализ состава структуры, а также определяет подвижности.
В целом можно сказать, что преследуемые цели зачастую направлены на определение возможной деформации структуры. Провести полноценный анализ можно только при всестороннем рассмотрении механизма.
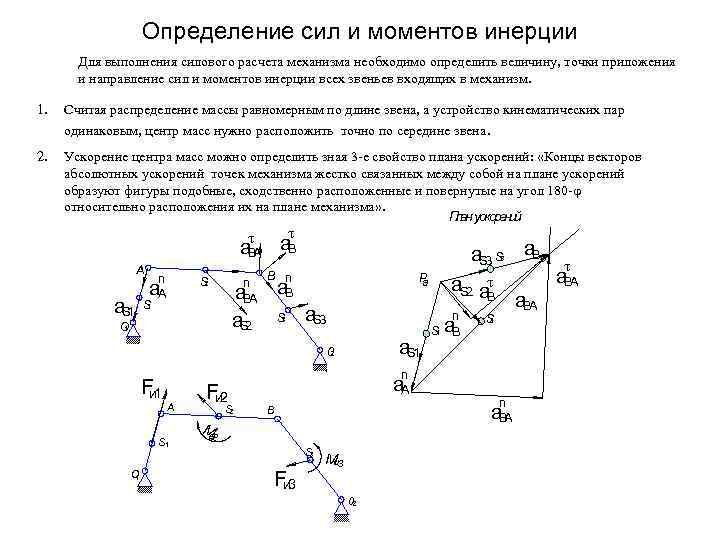
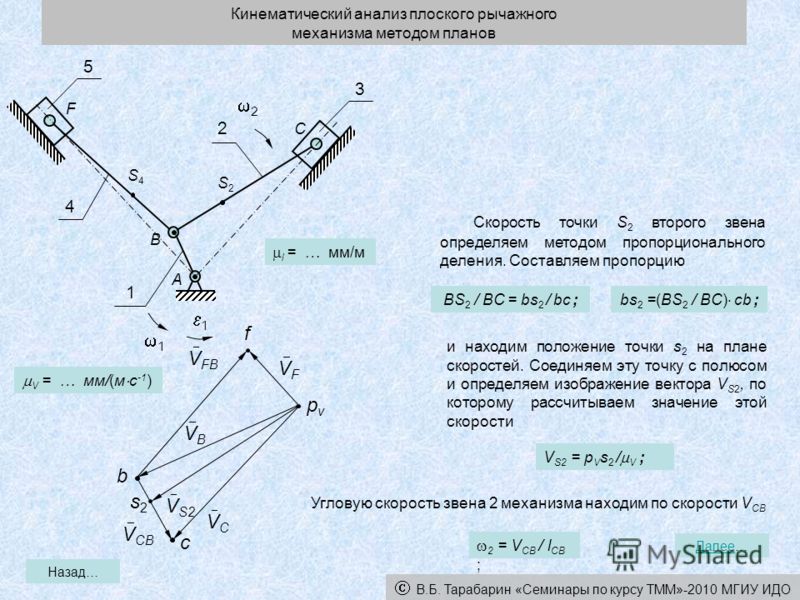
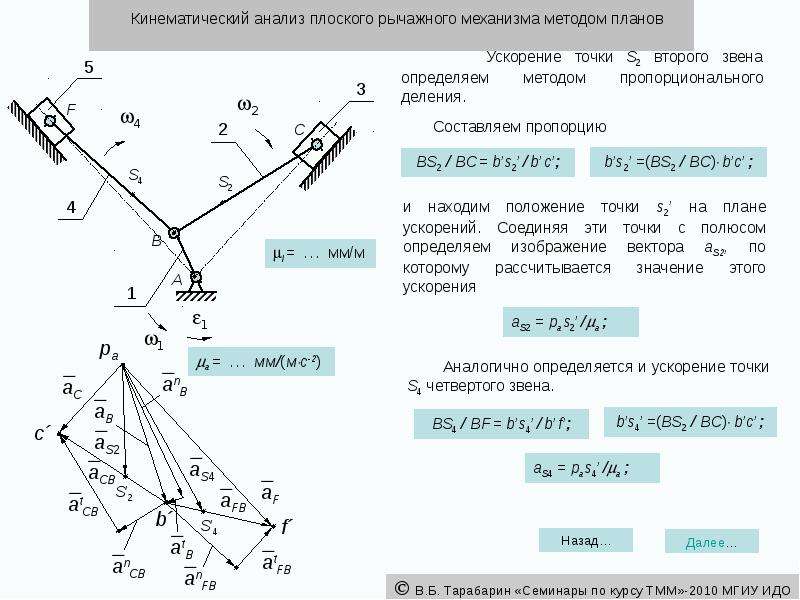
Статическое уравновешивание кривошипно-ползунного механизма
Во время перемещения звеньев механизма с изменяющимися скоростями (ускоренного движения) в них возникают инерционные силы и моменты. Их называют динамическими нагрузками. Такие нагрузки приводят к появлению вибраций, колеблющиеся детали излучают свои колебания в воздух, вызывая воздушный шум.
Динамические нагрузки приводят также к многократным деформациям деталей, их повышенному износу, накоплению усталости материала и преждевременному разрушению.
Шум и вибрация оказывают также негативное влияние на людей и точные механизмы, находящиеся рядом с источником. И, наконец, на возбуждение колебаний и излучение шума тратится энергия, это снижает КПД кривошипно-ползунного механизма.
Причины возникновения вибрации делятся на:
- силовые, колебания возмущаются периодическим приложением сил к объекту;
- кинематические, возмущение возникает за счет движения деталей;
- параметрические, возбуждение происходит за счет сил и моментов инерции.
Виброактивность делится на
- Внутреннюю, возникающую и распространяющуюся в пределах физических границ кривошипно-ползунного механизма. Она действует только на его детали и мало распространяется вовне.
- Внешнюю. Она действует на опоры механизма, его связи с другими частями общей конструкции, трансмиссию и далее. Основная причина, вызывающая такую виброактивность — неуравновешенность рычагов и звеньев.
Для устранения причин возникновения вибрации проводят статическое уравновешивание кривошипно-ползунного механизма. Механизм должен находиться в равновесии в состоянии покоя, при этом силы трения полагаются нулевыми.
Для этого вычисляют массы всех звеньев и строят график сил, действующих на них в состоянии покоя, прежде всего сил тяжести. Массы звеньев должны быть уравновешены с учетом длины рычагов (расстояния от центра вращения).
В ходе статического уравновешивания массы звеньев полагаются сосредоточенными в геометрическом центре звена.
Если общий центр масс системы совершает ускоренное движение, механизм считают неуравновешенным. Цель процедуры — достижение нулевого значения ускорения центра масс. Для этого к движущимся частям добавляют уравновешивающие массы, сводящие ускорение к нулю.
После статического уравновешивания наступает этап динамического уравновешивания кривошипно-ползунного механизма. При этом расчеты ведутся уже с учетом реальной пространственной конфигурации деталей.
В ходе производства реального изделия из-за дефектов материала, погрешностей отливки, механообработки и сборки возникают дополнительные разбалансировки звеньев. Для их устранения применяется балансировка кривошипно-ползунного механизма. Она заключается в:
- определении места дисбаланса с помощью средств вибродиагностики;
- передвижения и закрепления балансировочных грузов, предусмотренных конструкцией изделия;
- высверливание, выборка или наплавка необходимых масс материала в рассчитанных местах;
- повторной вибродиагностике.
Цикл операций повторяется до тех пор, пока подвижные части не будут удовлетворительно уравновешены.
Задачи для самостоятельного решения
Задача 1
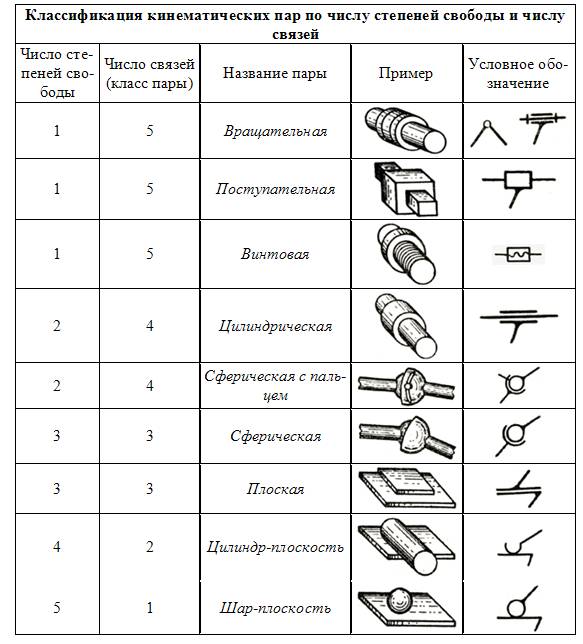
Установить класс кинематической пары, образуемой плоской (1) и конической (2) поверхностями (конус касается плоскости только вершиной). По отношению к координатным осям xyzперечислить все виды допускаемых движений конуса относительно плоскости.
Задача2
Для плоской кинематической пары, представленной на рисунке, установить:
– высшая пара, или низшая;
– класс кинематической пары;
– число подвижностей в относительном движении звеньев 1 и 2.
Задача3
Конус 2 касается плоскости 1 своей образующей. Для кинематической пары, образуемой указанными звеньями, установить класс и число подвижностей в относительном движении звеньев 1 и 2 (назвать эти подвижности по отношению к какой-либо системе координат, связанной с плоскостью).




Задача 4
Конус 2 касается плоскости 1 кромкой своего основания, вершина конуса s удалена от плоскости на расстояние где – проекция вершины конуса на плоскость. Для кинематической пары, образуемой указанными звеньями, установить класс и число подвижностей в относительном движении звеньев 1 и 2 (назвать эти подвижности по отношению к какой-либо системе координат, связанной сплоскостью).
Задача 5
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 9.
Задача6 (см. рисунок к задаче 5)
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 4.
Задача7 (см. рисунок к задаче 5)
Для механизма с одной степенью свободы написать формулу строения механизма при начальном звене 5.
Задача8
Для механизма с одной степенью свободы пронумеровать звенья и написать формулу строения механизма при начальном звене OA.
Задача 9
Считая звено 1 начальным, указать структурную группу, которую можно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 10 (см. рисунок к задаче 9)
Считая звено 2 начальным, указать структурную группу, которую можно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 11
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 9.
Задача 12 (см. рисунок к задаче 11)
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 5.
Задача 13 (см. рисунок к задаче 11)
Считая звено 9 начальным, указать структурную группу, которую можно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 14
Считая звено 1 начальным, указать две первые структурные группы, которые можно поочередно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 15
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 4.
Задача 16 (см. рисунок к задаче 15)
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 6.
Задача 17 (см. рисунок к задаче 15)
Считая звено 1 начальным, указать структурную группу, которую можно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 18
Считая звено 1 начальным, указать две первые структурные группы, которые можно поочередно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 19 (см. рисунок к задаче 18)
Считая звено 5 начальным, указать две первые структурные группы, которые можно поочередно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 20 (см. рисунок к задаче 18)
Считая звено 3 начальным, указать две первые структурные группы, которые можно поочередно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 21 (см. рисунок к задаче 18)
Считая звено 5 начальным, указать номера звеньев, образующих группу III класса 3-го порядка.
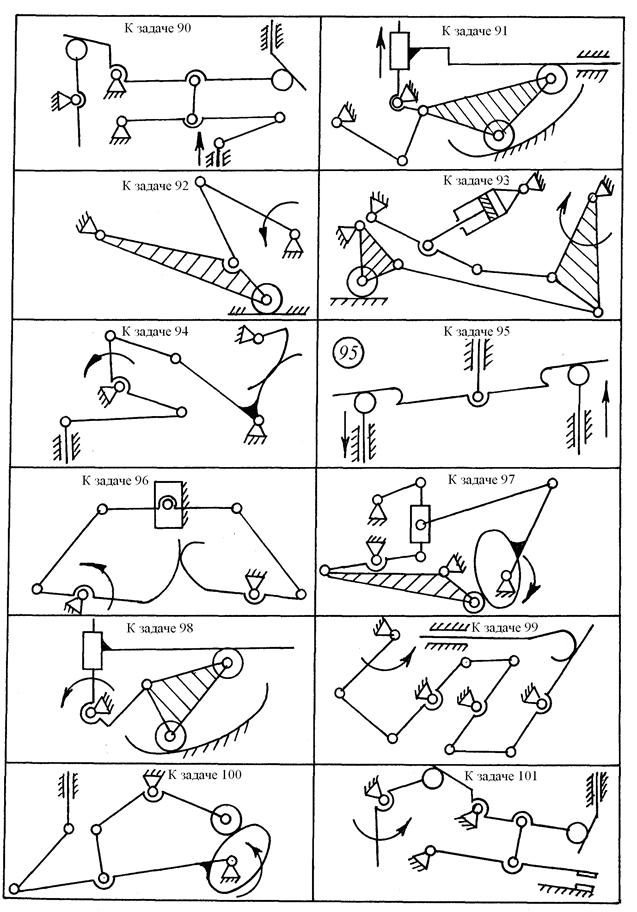
Задачи 22 – 24
Для механизма с высшей кинематической парой построить заменяющий механизм; замену высшей пары произвести непосредственно на кинематической схеме. Написать формулу строения заменяющего механизма при начальном звене 4.

Задачи 25 – 30
Если изображенная кинематическая цепь является структурной группой, указать ее класс и порядок (в противном случае объяснить, почему цепь не является группой).
Направляющая 1 в состав кинематической цепи не входит
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика
00:00:00