Виды колебаний
Колебания, которые происходят в замкнутых системах называются свободными
или собственными
колебаниями. Колебания, которые происходят под действием внешних сил, называют вынужденными
. Встречаются также автоколебания
(вынуждаются автоматически).
Если рассматривать колебания согласно изменяющихся характеристик (амплитуда, частота, период и др.), то их можно разделить на гармонические
, затухающие
, нарастающие
(а также пилообразные, прямоугольные, сложные).
При свободных колебаниях в реальных системах всегда происходят потери энергии. Механическая энергия расходуется, например, на совершение работы по преодолению сил сопротивления воздуха. Под влиянием силы трения происходит уменьшение амплитуды колебаний, и через некоторое время колебания прекращаются. Очевидно, что чем больше силы сопротивления движению, тем быстрее прекращаются колебания.
Периоды колебаний в природе
Представление о периодах колебаний различных физических процессов дает статья Частотные интервалы (учитывая то, что период в секундах есть обратная величина частоты в герцах).
Некоторое представление о величинах периодов различных физических процессов также может дать шкала частот элетромагнитных колебаний (см. Электромагнитный спектр) .
Периоды колебаний слышимого человеком звука находятся в диапазоне
От 5·10 −5 до 0,2
(четкие границы его несколько условны).
Периоды электромагнитных колебаний, соответствующих разным цветам видимого света – в диапазоне
От 1,1·10 −15 до 2,3·10 −15 .
Поскольку при экстремально больших и экстремально маленьких периодах колебаний методы измерения имеют тенденцию
становятся всё более косвенными (вплоть до плавного перетекания в теоретические экстраполяции), трудно назвать четкую верхнюю и нижнюю границы для периода колебаний, измеренного непосредственно. Какую-то оценку для верхней границы может дать время существования современной науки (сотни лет), а для нижней – период колебаний волновой функции самой тяжелой из известных сейчас частиц ().
В любом случае границей снизу
может служить планковское время , которое столь мало, что по современным представлениям не только вряд ли может быть вообще как-то физически измерено , но и вряд ли в более-менее обозримом будущем представляется возможность приблизиться к измерению величин даже намного порядков больших, а границей сверху
– время существования Вселенной – более десяти миллиардов лет.
2.2. Свободные колебания. Пружинный маятник window.top.document.title = “2.2. Свободные колебания. Пружинный маятник”;
Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия.
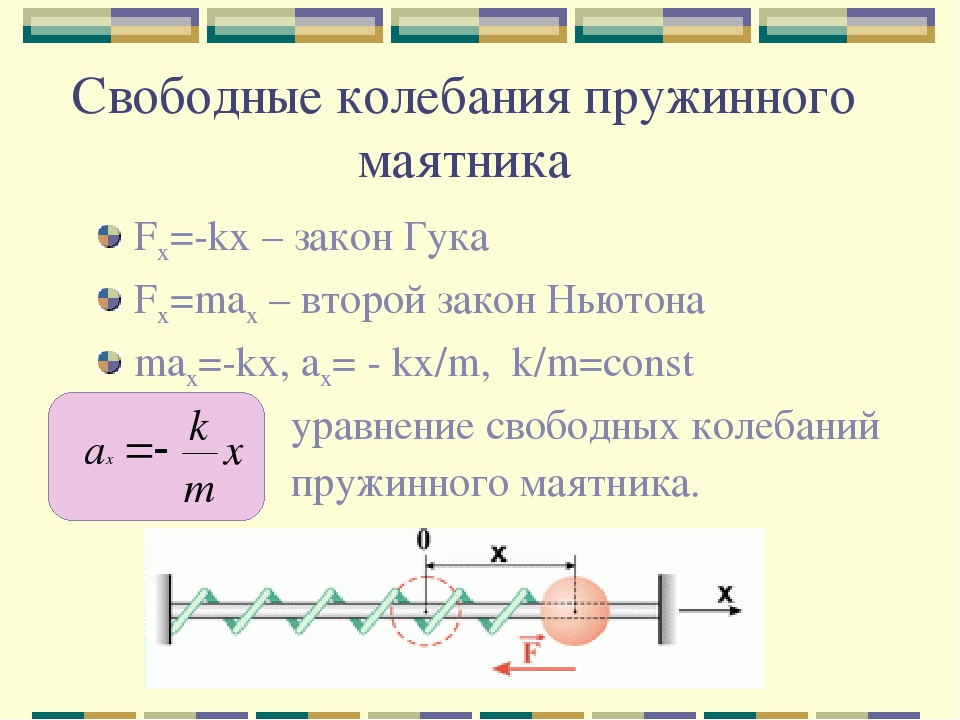
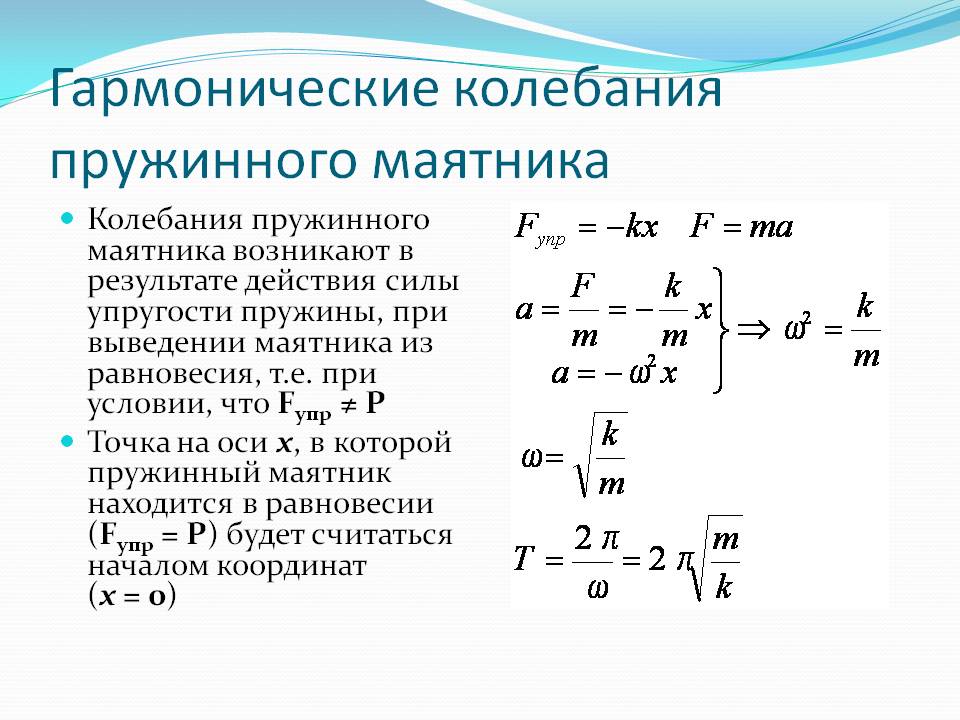
Для того, чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению (см. §2.1):
В этом соотношении ω – круговая частота гармонических колебаний. Таким свойством обладает упругая сила в пределах применимости закона Гука:
Силы любой другой физической природы, удовлетворяющие этому условию, называются квазиупругими.
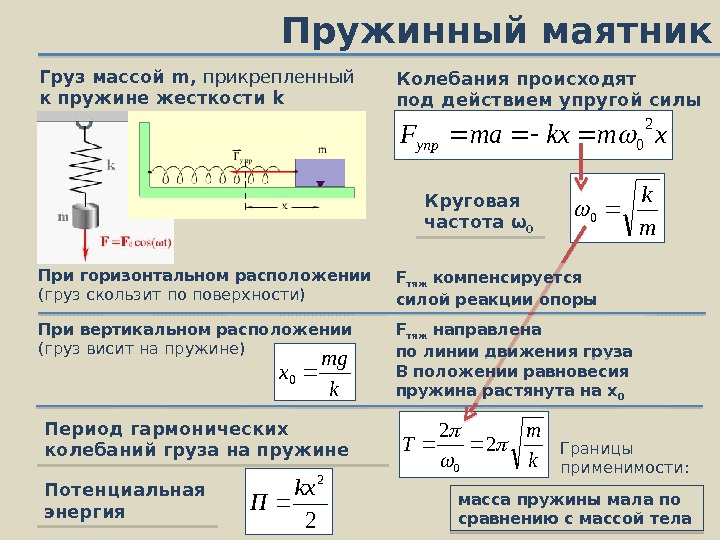
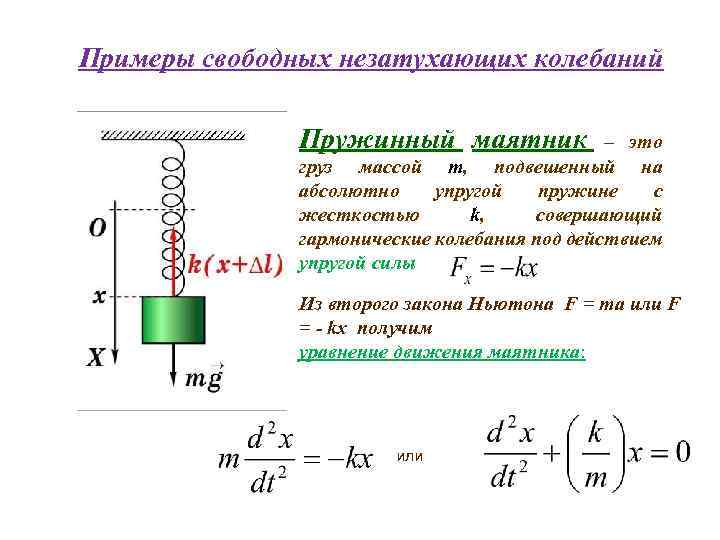
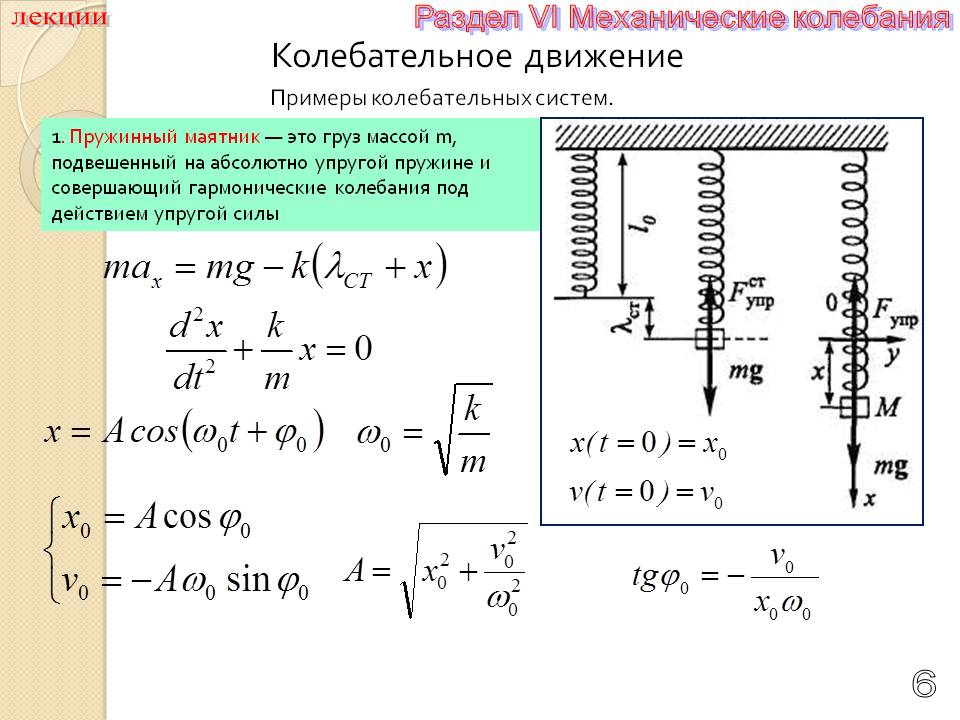
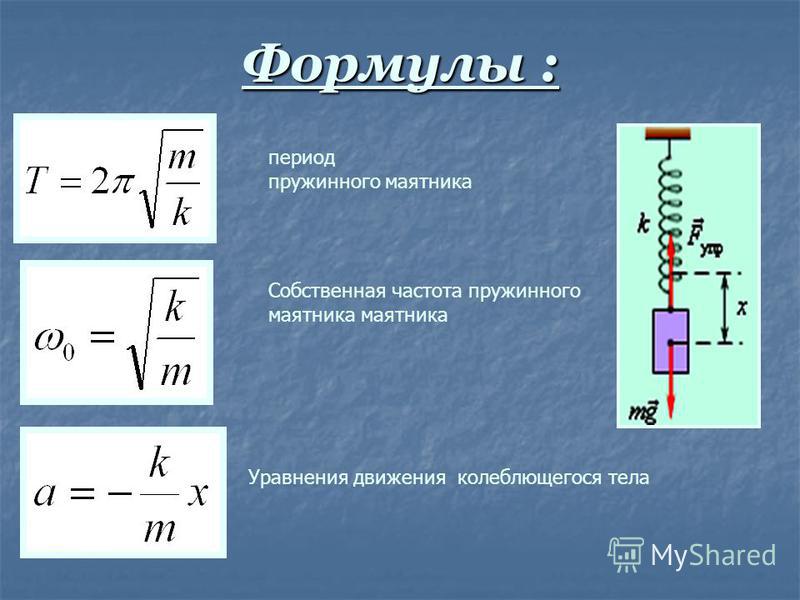
Таким образом, груз некоторой массы m, прикрепленный к пружине жесткости k, второй конец которой закреплен неподвижно (рис. 2.2.1), составляют систему, способную в отсутствие трения совершать свободные гармонические колебания. Груз на пружине называют линейным гармоническим осциллятором.
 |
| Рисунок 2.2.1.Колебания груза на пружине. Трения нет |
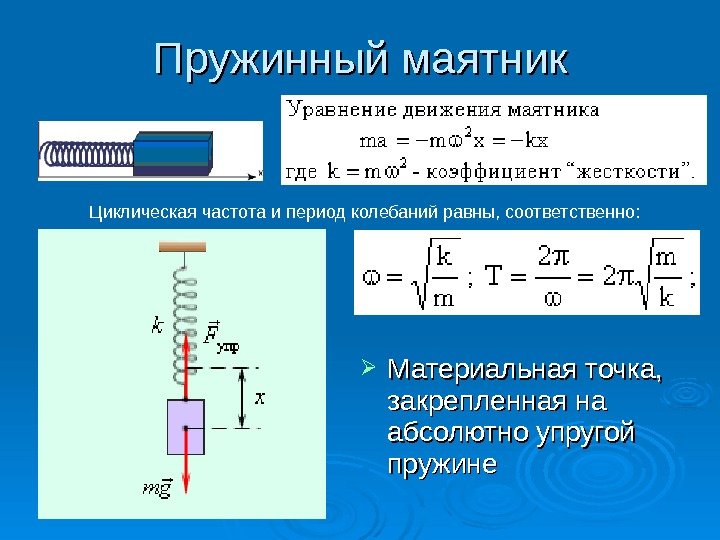
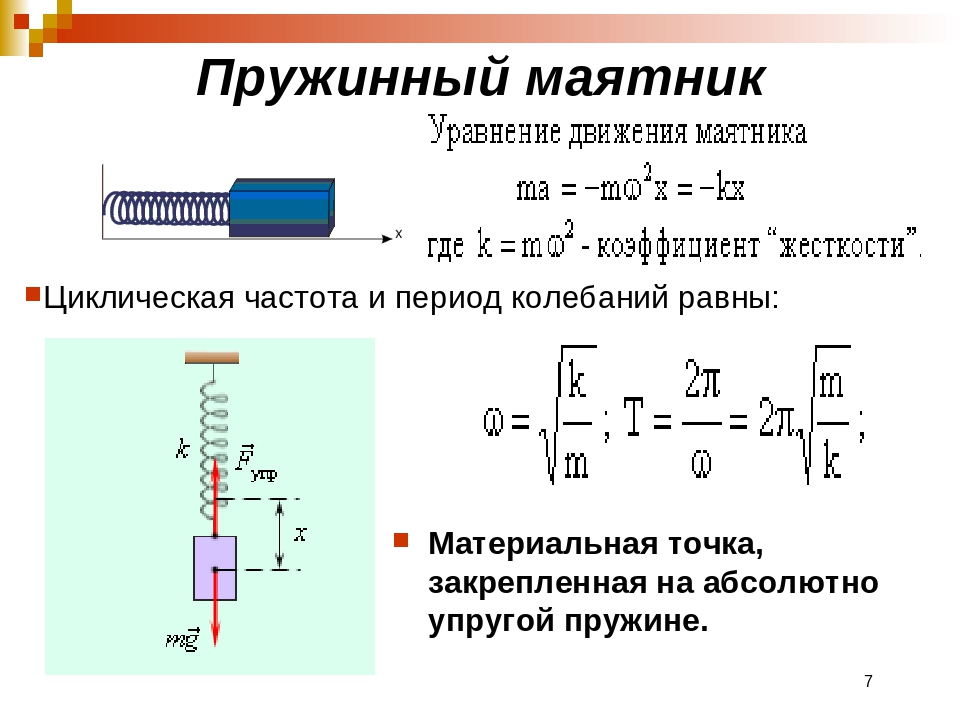
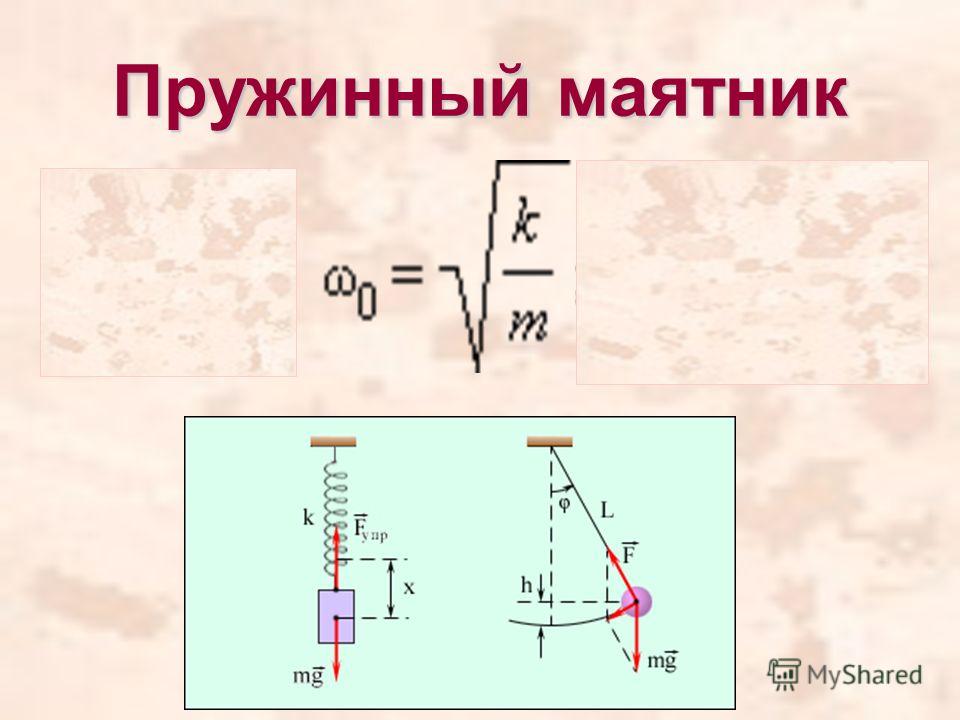
Круговая частота ω свободных колебаний груза на пружине находится из второго закона Ньютона:
Частота ω называется собственной частотой колебательной системы.
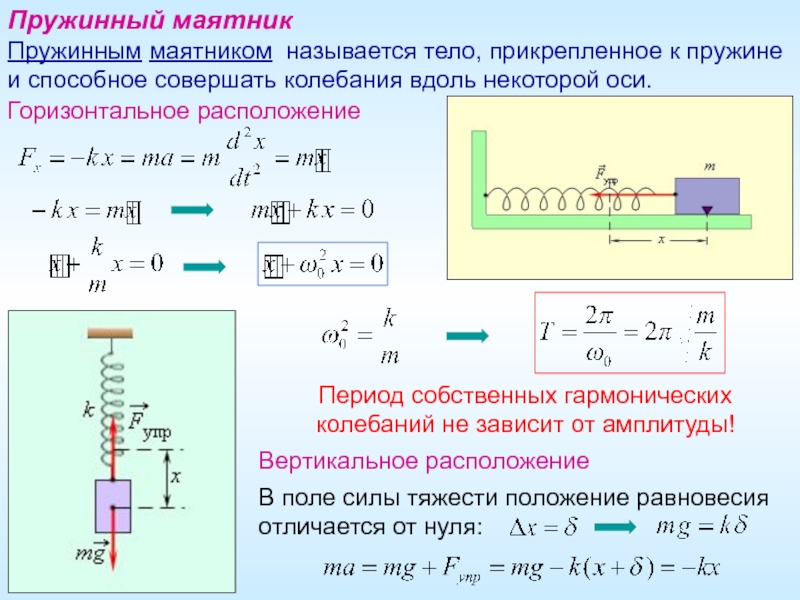
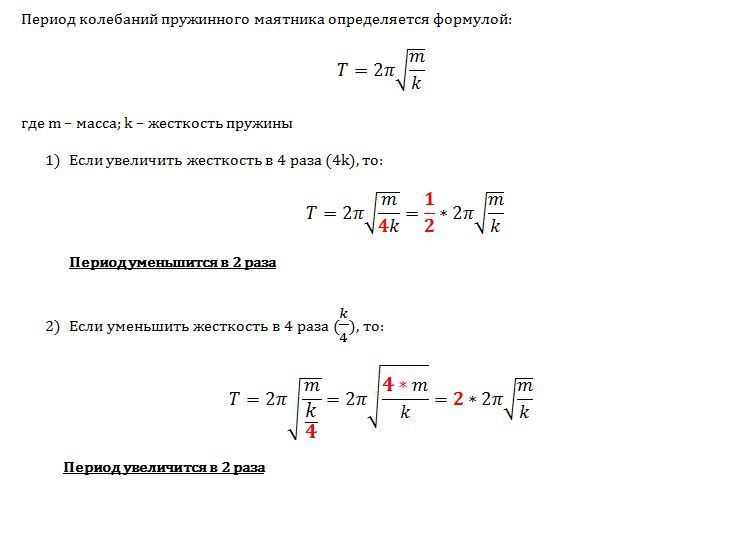
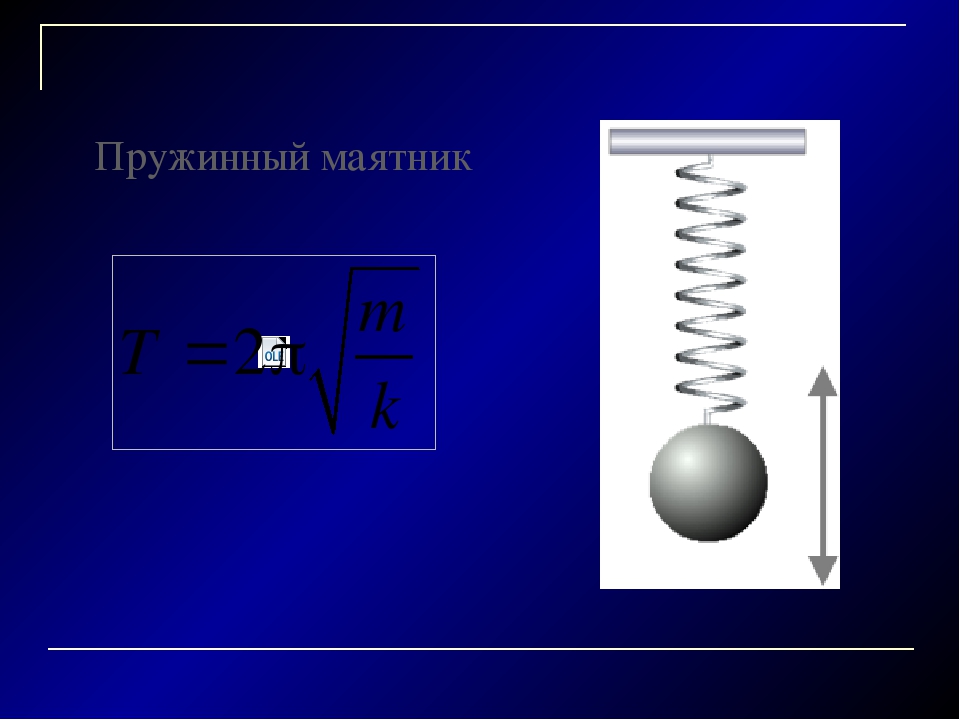
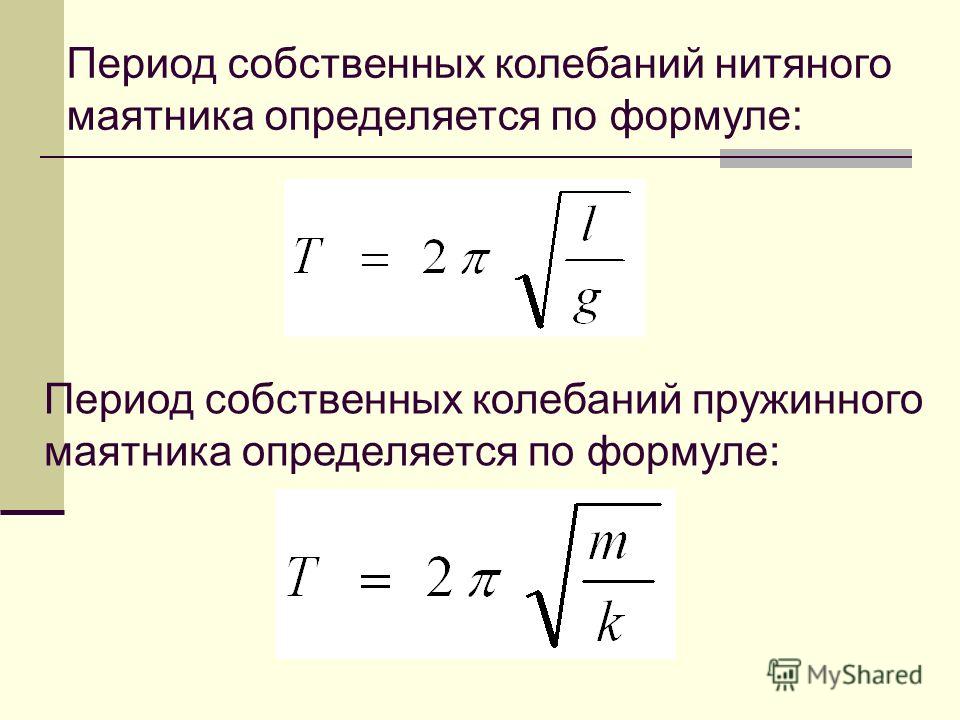
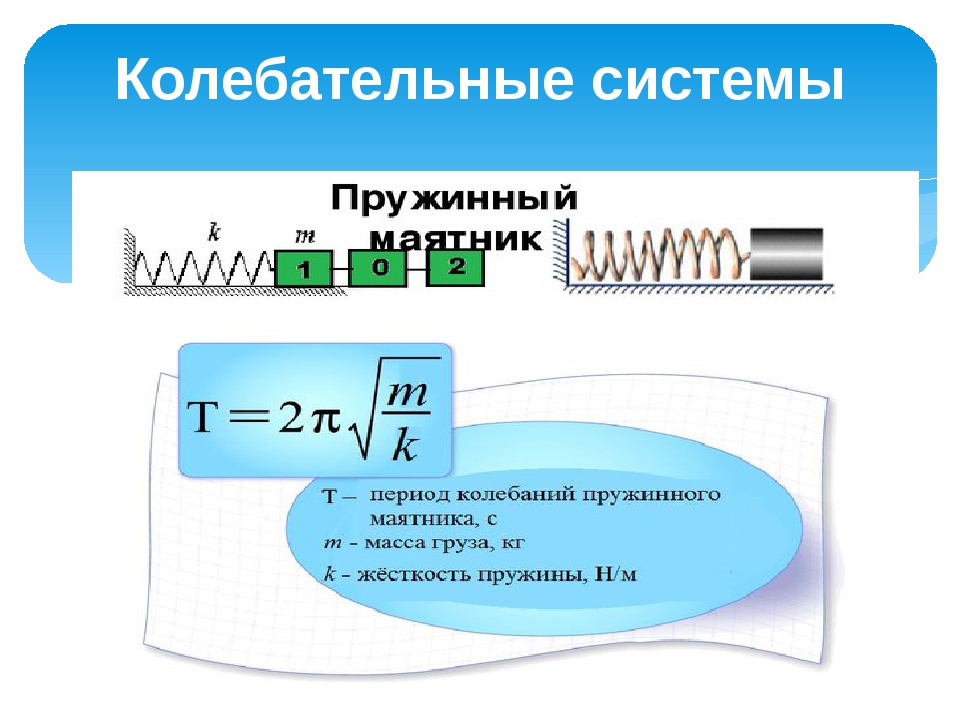
Период T гармонических колебаний груза на пружине равен
При горизонтальном расположении системы пружина–груз сила тяжести, приложенная к грузу, компенсируется силой реакции опоры. Если же груз подвешен на пружине, то сила тяжести направлена по линии движения груза. В положении равновесия пружина растянута на величину x, равную
ωT
Строгое описание поведения колебательной системы может быть дано, если принять во внимание математическую связь между ускорением тела a и координатой x: ускорение является второй производной координаты тела x по времени t:
Поэтому второй закон Ньютона для груза на пружине может быть записан в виде
Все физические системы (не только механические), описываемые уравнением (*), способны совершать свободные гармонические колебания, так как решением этого уравнения являются гармонические функции вида
Уравнение (*) называется уравнением свободных колебаний
Следует обратить внимание на то, что физические свойства колебательной системы определяют только собственную частоту колебаний ω или период T. Такие параметры колебательного процесса, как амплитуда xm и начальная фаза φ, определяются способом, с помощью которого система была выведена из состояния равновесия в начальный момент времени. Если, например, груз был смещен из положения равновесия на расстояние Δl и затем в момент времени t = 0 отпущен без начальной скорости, то xm = Δl, φ = 0
Если, например, груз был смещен из положения равновесия на расстояние Δl и затем в момент времени t = 0 отпущен без начальной скорости, то xm = Δl, φ = 0.
Если же грузу, находившемуся в положении равновесия, с помощью резкого толчка была сообщена начальная скорость то ,
Таким образом, амплитуда xm свободных колебаний и его начальная фаза φ определяются начальными условиями.
 |
| Модель. Колебания груза на пружине |
Существует много разновидностей механических колебательных систем, в которых используются силы упругих деформаций. На рис. 2.2.2 показан угловой аналог линейного гармонического осциллятора, совершающий крутильные колебания. Горизонтально расположенный диск висит на упругой нити, закрепленной в его центре масс. При повороте диска на угол θ возникает момент сил Mупр упругой деформации кручения:
Это соотношение выражает закон Гука для деформации кручения. Величина χ аналогична жесткости пружины k. Второй закон Ньютона для вращательного движения диска записывается в виде (см. §1.23)
I = ICε
По аналогии с грузом на пружине можно получить:
Крутильный маятник широко используется в механических часах. Его называют балансиром. В балансире момент упругих сил создается с помощью спиралевидной пружинки.


| Рисунок 2.2.2.Крутильный маятник |
Вынужденные колебания
А вот вынужденные колебания восполняют запас энергии внешним воздействием. Если это происходит каждый период, то колебания вообще затухать не будут.
Вынужденные колебания — это колебания, которые происходят под действием внешней периодически меняющейся силы.
Частота, с которой эта сила воздействует, равна частоте, с которой система будет колебаться.
Например, качели. Если вас кто-то будет на них качать, каждый раз давая толчок, когда вы приходите в одну и ту же точку — такое колебание будет считаться вынужденным.
Это колебание все еще будет считаться вынужденным, если вас будут раскачивать из положения равновесия. Просто в данном случае амплитуда (о которой речь пойдет чуть ниже) будет увеличиваться с каждым колебанием.
Без лишних колебаний запишите ребенка на вводное занятие по физике в онлайн-школу Skysmart. Ученики занимаются на интерактивной платформе, в комфортном темпе и с внимательными учителями.
Никаких скучных заданий! Вместо этого — захватывающие примеры из жизни, вдохновение и поддержка.
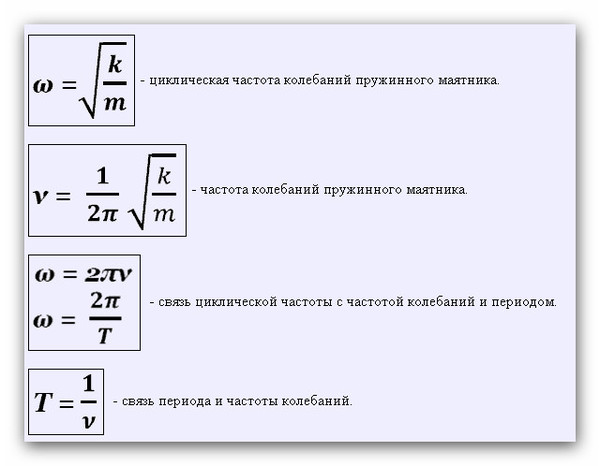
Циклическая частота
В физике циклическая и круговая частота имеют одинаковое значение. Данная величина еще называется угловой частотой.

Обозначают ее буквой омега. Она равна числу собственных колебательных движений тела за 2π секунд времени:
ω = 2π/T = 2πν.
Данная величина нашла свое применение в радиотехнике и, исходя из математического расчета, имеет скалярную характеристику. Ее измерения проводят в радианах на секунду. С ее помощью значительно упрощаются расчеты процессов в радиотехнике.
Например, резонансное значение угловой частоты колебательного контура рассчитывают по формуле:
WLC = 1/LC.
Тогда как обычная циклическая резонансная частота выражается:
VLC = 1/2π*√ LC.
В электрике под угловой частотой следует понимать число полных трансформаций ЭДС или число оборотов радиуса – вектора. Здесь ее обозначают буквой f.
Звук
Звук – это колебания упругой среды, воспринимаемые органом слуха.
Условия, необходимые для возникновения и ощущения звука:
- наличие источника звука;
- наличие упругой среды между источником и приемником звука;
- наличие приемника звука; • частота колебаний должна лежать в звуковом диапазоне;
- мощность звука должна быть достаточной для восприятия.
Звуковые волны – это упругие волны, вызывающие у человека ощущение звука, представляющие собой зоны сжатия и разряжения, передающиеся на расстояние с течением времени.
Классификация звуковых волн:
- инфразвук (\( \nu \) < 16 Гц);
- звуковой диапазон (16 Гц < \( \nu \) < 20 000 Гц);
- ультразвук (\( \nu \) > 20 000 Гц).
Скорость звука – это скорость распространения фазы колебания, т. е. области сжатия и разряжения среды.
Скорость звука зависит
от упругих свойств среды:
в воздухе – 331 м/с, в воде – 1400 м/с, в металле – 5000 м/с;
от температуры среды:
в воздухе при температуре 0°С – 331 м/с, в воздухе при температуре +15°С – 340 м/с.
Характеристики звуковой волны
- Громкость – это величина, характеризующая слуховые ощущения человека, зависящая от амплитуды колебаний в звуковой волне. Единицы измерения – дБ (децибел).
- Высота тона – это величина, характеризующая слуховые ощущения человека, зависящая от частоты колебаний в звуковой волне. Чем больше частота, тем выше звук. Чем меньше частота, тем ниже звук.
- Тембр – это окраска звука.
Музыкальный звук – это звук, издаваемый гармонически колеблющимся телом. Каждому музыкальному тону соответствует определенная длина и частота звуковой волны.Шум – хаотическая смесь тонов.
Колебательные движения. Формулы
Такие движения относят к явлениям с разной физической природой с подчинением общим закономерностям. Запись колебания тока в электрической цепи и математического маятника производится одним и тем же уравнением. Различная природа колебательных движений позволяет рассматривать их с единой точки зрения, исходя из общности закономерностей.
Определение 2
Механические колебания – это периодические или непериодические изменения физической величины, описывающей механическое движение (скорость, перемещение и так далее).
Когда в заданной среде атомы располагаются очень близко или молекулы испытывают силовое воздействие, наблюдается возбуждение механических колебаний. Это говорит о том, что процесс будет иметь конечную скорость, зависящую от свойств среды, которая распространяется от точки к точке. Так возникают механические волны. Явный пример – звуковые волны в воздухе.
Волновые процессы и колебания разной природы имеют много общего, а их распространение может быть описано аналогичными математическими уравнениями. Это подтверждает единство материального мира.
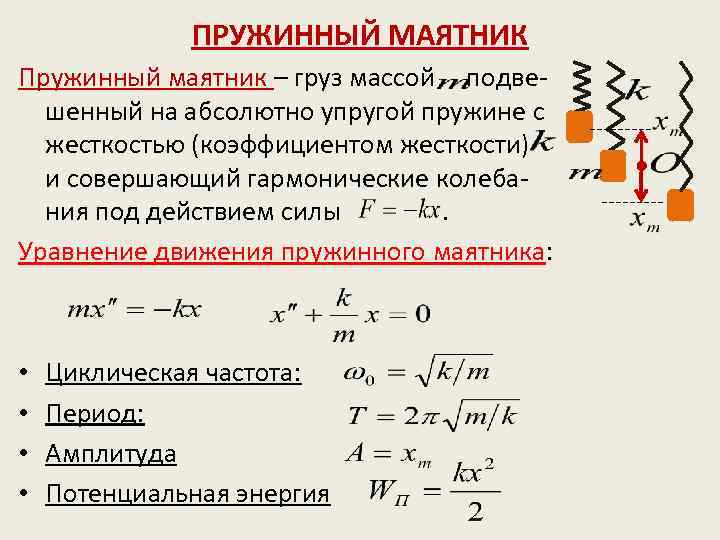
Свойства пружинного маятника
Идеальный пружинный маятник представляет собой пружину, массой которой можно пренебречь, с закрепленным на ней телом с точечной массой. При этом один или оба конца пружины закреплены, а силой трения можно пренебречь.
Такую конструкцию можно рассматривать лишь как математическую модель. Примерами реальных пружинных маятников (навитых из упругой проволоки цилиндрических спиралей) могут служить всевозможные устройства, гасящие колебания: амортизаторы, подвески, рессоры и т.п. Пружинные маятники, хотя и несколько иной конструкции (в виде плоских спиралей) используются в механических часах.
Свойства пружин зависят от вещества, из которого они изготовлены (как правило, это особая пружинная сталь), диаметра проволоки, формы ее сечения, диаметра цилиндра пружины, его длины. Эти показатели в совокупности обуславливают ключевую характеристику пружины – ее жесткость.
Пружина запасает энергию при продольном растяжении или сжатии за счет упругих деформаций в кристаллической решетке своего вещества.
Попробуй обратиться за помощью к преподавателям
При слишком сильном растяжении или сжатии материал пружины теряет упругие свойства. Такая деформация называется пластической или остаточной.





Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1) . Дифференцируем это равенство:
Теперь дифференцируем полученное равенство (4) :
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем :
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре). Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными ;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6) , (7) описывают гармонические колебания с циклической частотой и только их. Две константы определяются из начальных условий – по начальным значениям координаты и скорости.
Темы по физике
- Механика (56)
- Кинематика (19)
- Динамика и статика (32)
- Гидростатика (5)
- Молекулярная физика (25)
- Уравнение состояния (3)
- Термодинамика (15)
- Броуновское движение (6)
- Прочие формулы по молекулярной физике (1)
- Колебания и волны (22)
- Оптика (9)
- Геометрическая оптика (3)
- Физическая оптика (5)
- Волновая оптика (1)
- Электричество (39)
- Атомная физика (15)
- Ядерная физика (3)
Темы по математике
- Квадратный корень, рациональные переходы (1)
- Квадратный трехчлен (1)
- Координатный метод в стереометрии (1)
- Логарифмы (1)
- Логарифмы, рациональные переходы (1)
- Модуль (1)
- Модуль, рациональные переходы (1)
- Планиметрия (1)
- Прогрессии (1)
- Производная функции (1)
- Степени и корни (1)
- Стереометрия (1)
- Тригонометрия (1)
- Формулы сокращенного умножения (1)
Кинетическая энергия
Определение 1 Кинетическая энергия — внутренняя энергия движущегося тела, обусловленная его инертностью (массой) и скоростью. Она равна энергии, которую нужно затратить, чтобы снизить скорость этого тела до нуля.
Например, движущийся автомобиль невозможно остановить мгновенно. Для остановки необходимо затратить энергию трения тормозных колодок о тормозные диски колес и шин об асфальт.
Замечание 1
Кинетическая и потенциальная энергия измеряются в джоулях ($1 Дж = Н \cdot м$).
В некоторых физических системах происходят циклические преобразования потенциальной (запасенной) энергии в кинетическую и обратно. Такие системы называются маятниками. Например, для груза, подвешенного на нити, потенциальная энергия максимальна, когда он отклонен на максимальный угол от вертикали. Мгновенная скорость груза в этот момент равна нулю и, следовательно, нулю равна и кинетическая энергия. По мере движения вниз под действием силы тяжести, скорость груза нарастает и достигает максимума в нижней точке, после чего снова начинает запасаться по мере движения вверх.
Готовые работы на аналогичную тему
- Курсовая работа Максимальная кинетическая энергия груза: формула 430 руб.
- Реферат Максимальная кинетическая энергия груза: формула 220 руб.
- Контрольная работа Максимальная кинетическая энергия груза: формула 190 руб.
Получить выполненную работу или консультацию специалиста по вашему учебному проекту Узнать стоимость
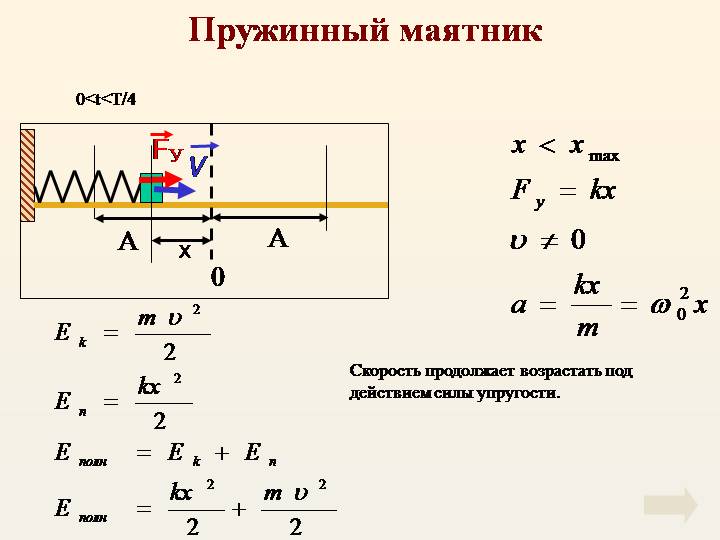
Проще всего изучать переход кинетической и потенциальной энергий друг в друга на примере пружинного маятника, где действует, если пренебречь силой трения, лишь сила упругости. Когда пружину сжимают, энергия запасается. Когда отпускают — потенциальная энергия, сохраненная в кристаллической решетке материала, высвобождается и превращается в кинетическую, разгоняя груз. Когда скорость груза достигает максимума, он продолжает движение по инерции, растягивая пружину в противоположном направлении, вновь запасая энергию и снижая скорость. Характеристики такого колебательного движения зависят только от материала пружины, толщины проволоки, из которой она намотана, диаметра и количества витков. Все эти факторы описываются единым параметром — коэффициентом упругости.
Математический маятник.
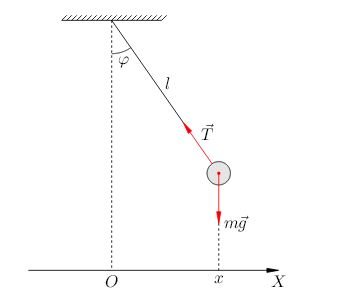
Математический маятник – это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5 ). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
|
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна . Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
и спроектируем его на ось :
Если маятник занимает положение как на рисунке (т. е. 0′ x>0′ /> ), то:
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
Итак, при любом положении маятника имеем:
Когда маятник покоится в положении равновесия, выполнено равенство . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство . Воспользуемся им в формуле (11) :
Это – уравнение гармонических колебаний вида (6) , в котором
Следовательно, циклическая частота колебаний математического маятника равна:
Отсюда период колебаний математического маятника:
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы
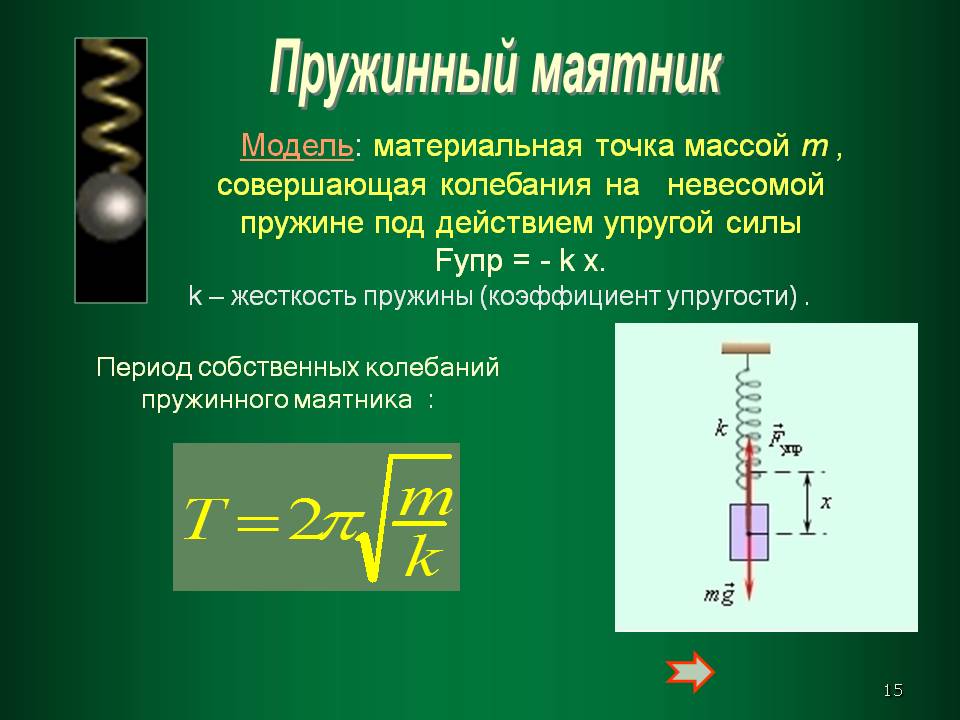
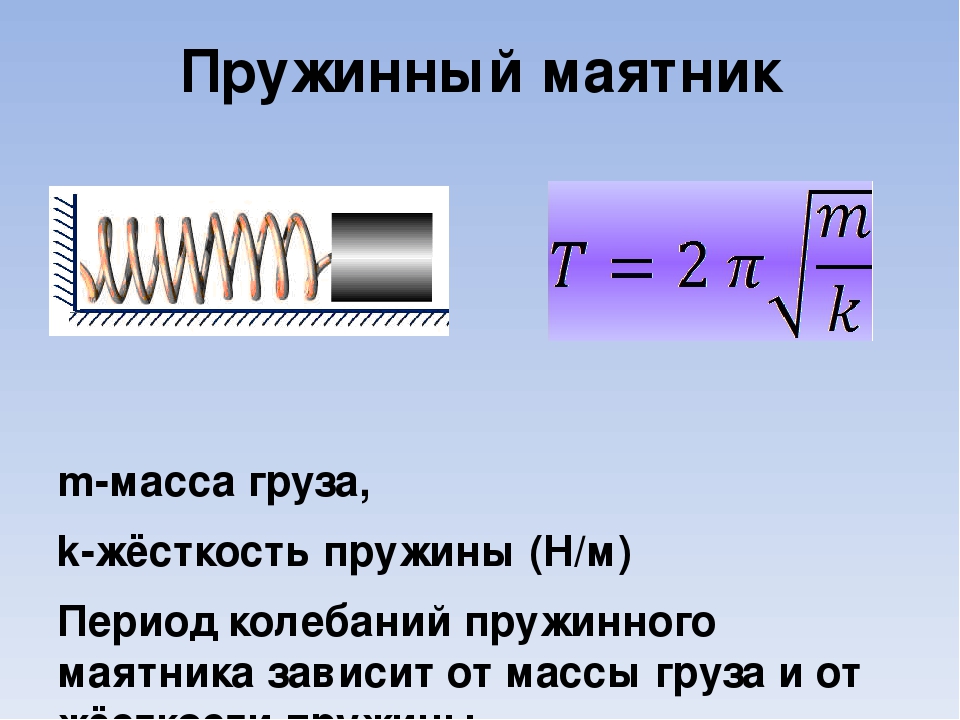
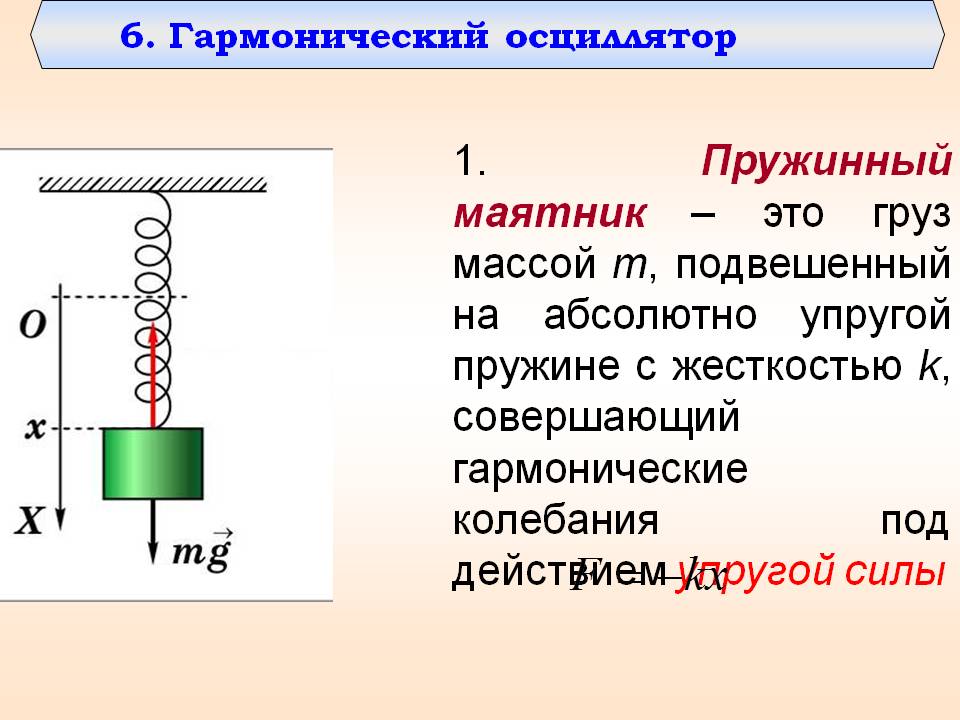
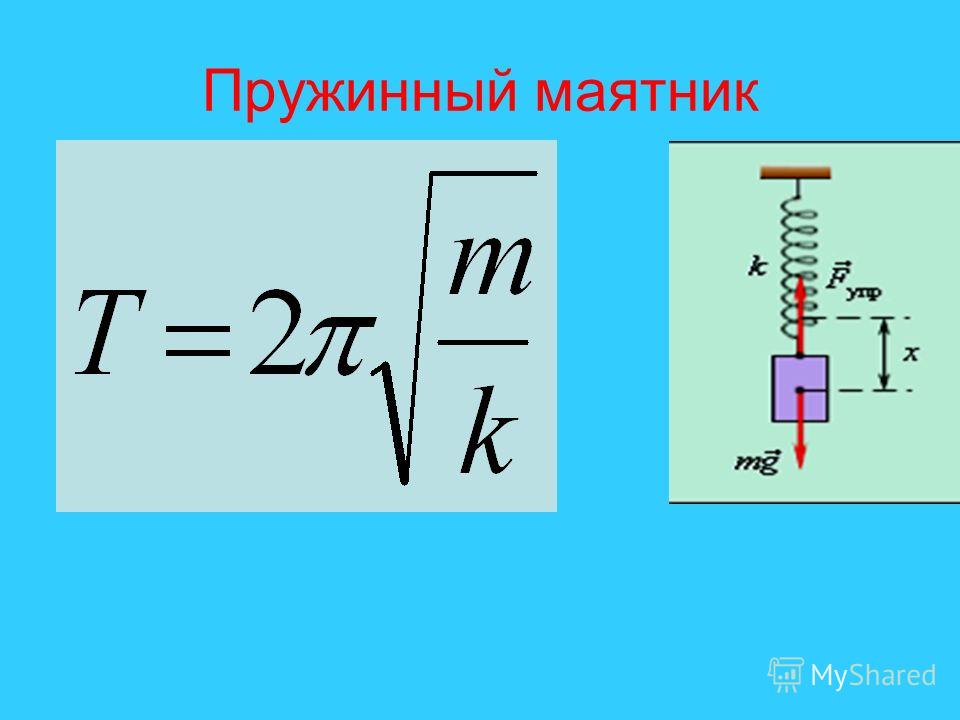
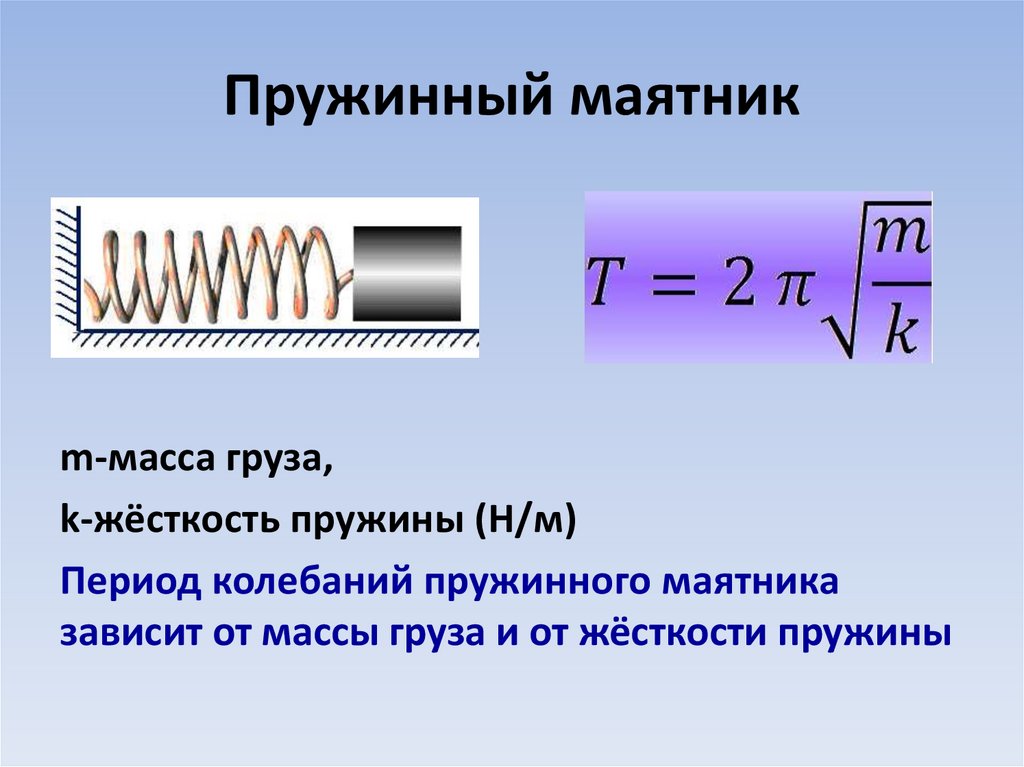
Что такое пружинный маятник
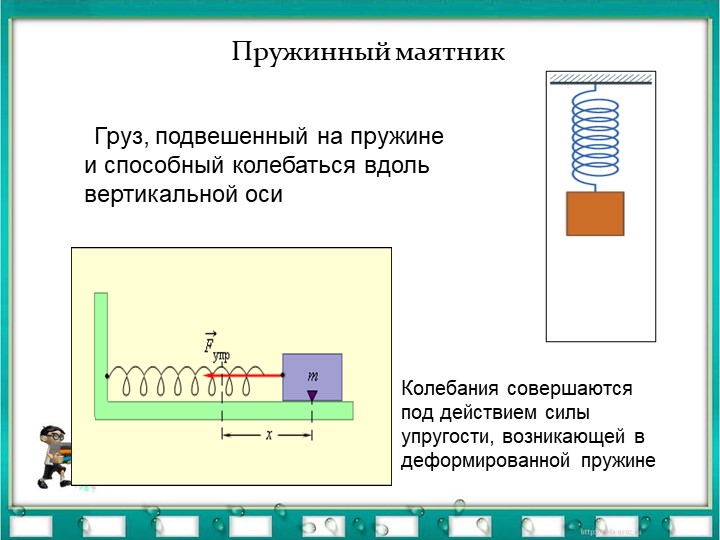
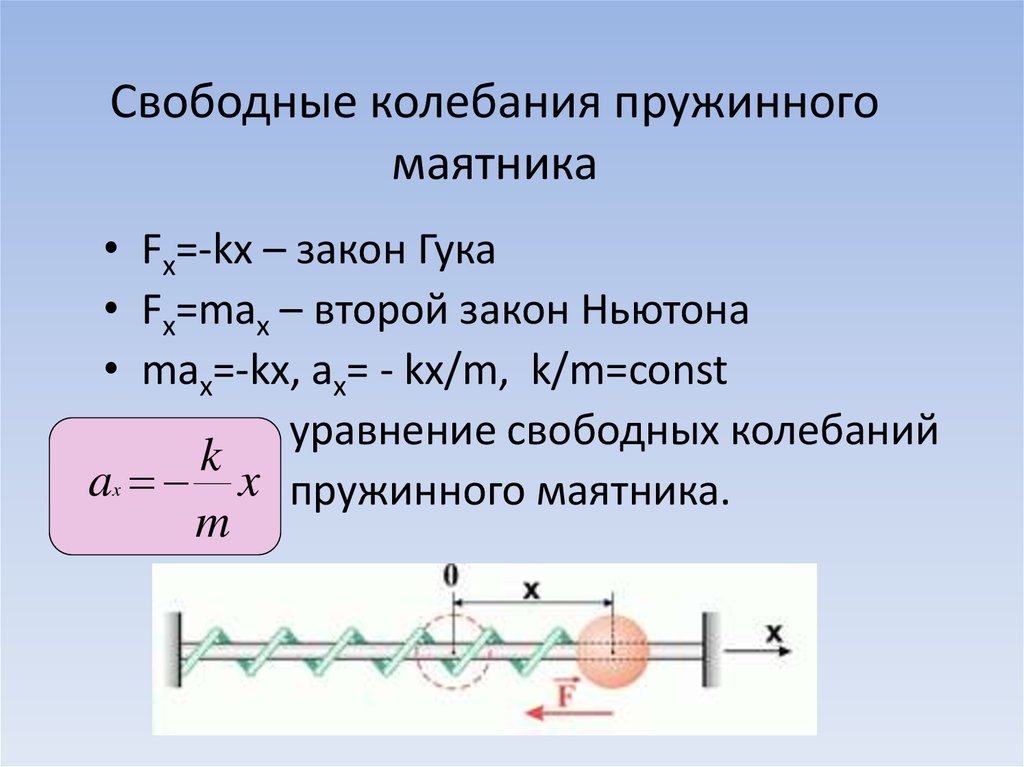
Пружинным маятником в физике называют систему, совершающую колебательные движения под действием силы упругости.
Приняты следующие обозначения:
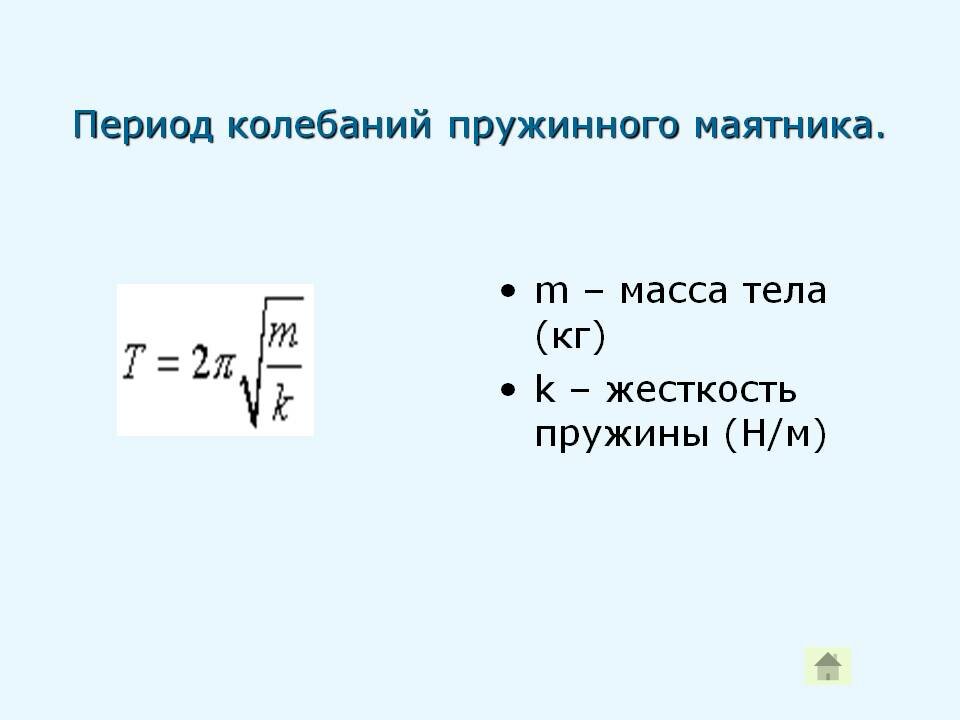
- m — масса тела;
- k — коэффициент жесткости пружины.
Общий вид маятника:
Особенностями пружинных маятников являются:
- Сочетание тела и пружины.
Массой пружины обычно в расчетах пренебрегают. Роль тела могут играть различные объекты. На них оказывают действие внешние силы. Груз может крепиться разными способами. Витки пружины, которыми она начинается и заканчивается, изготавливают с учетом повышенной нагрузки;
- У любой пружины есть исходное положение, предел сжатия и растяжения.
При максимальном сжатии зазора между витками нет. Когда она максимально растянута, возникает необратимая деформация;
- Полная механическая энергия появляется с началом процесса обратимого деформирования.
В этот момент на объект не оказывает действие сила упругости;
- Колебательные движения происходят под влиянием силы упругости.
Масштаб влияния определяется несколькими причинами (тип сплава, расположение витков и т. д.). Так как может происходить и сжатие и растяжение, можно сделать вывод, что сила упругости действует в двух противоположных направлениях;
-
- От массы тела, величины и направления прикладываемой силы зависит скорость в плоскости его перемещения.
Например, если подвесить груз к пружине и, растянув её, отпустить, то груз будет перемещаться в двух плоскостях: вертикально и горизонтально.



Автоколебания
Иногда вынужденному колебанию не нужно внешнего воздействия, чтобы случиться. Бывают такие системы, в которых это внешние воздействие возникает само из-за способности регулировать поступление энергии от постоянного источника.
У автоколебательной системы есть три важных составляющих:
- сама колебательная система
- источник энергии
- устройство обратной связи, обеспечивающей связь между источником и системой
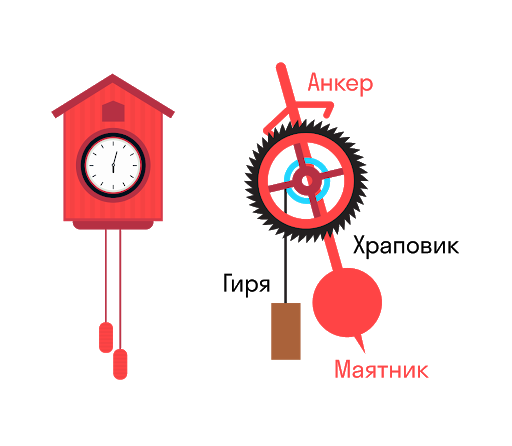
Часы с кукушкой — пример автоколебательной системы. Гиря на ниточке (цепочке) стремится вращать зубчатое колесо (храповик). При колебаниях маятника анкер цепляет за зубец, и вращение приостанавливается.Но в результате маятник получает толчок, компенсирующий потери энергии из-за трения. Потенциальная энергия гири, которая постепенно опускается, расходуется на поддержание незатухающих колебаний.
Частота колебаний.
Частота колебаний
— это число колебаний, совершаемых за единицу времени, например, за 1 с .
Единица частоты в СИ названа герцем
(Гц
) в честь немецкого физика Г. Герца (1857-1894). Если частота колебаний (v
) равна 1
Гц
, то это значит, что за каждую секунду совершается одно колебание. Частота и период колебаний связаны соотношениями:
В теории колебаний пользуются также понятием циклической
, или круговой частоты
ω
. Она связана с обычной частотой v
и периодом колебаний Т
соотношениями:
.
Циклическая частота
— это число колебаний, совершаемых за 2π
секунд.
Так и к ангармоническим строго периодическими колебаниям (а приближенно – с тем или иным успехом – и непериодическим колебаниям, по крайней мере к близким к периодичности).
В случае, когда речь идет о колебаниях гармонического осциллятора с затуханием , под периодом понимается период его осциллирующей составляющей (игнорируя затухание), который совпадает с удвоенным временным промежутком между ближайшими прохождениями колеблющейся величины через ноль. В принципе, это определение может быть с большей или меньшей точностью и пользой распространено в некотором обобщении и на затухающие колебания с другими свойствами.
Обозначения:
обычное стандартное обозначение периода колебаний:
T
{\displaystyle T}
(хотя могут применяться и другие, наиболее часто это
τ
{\displaystyle \tau }
, иногда
Θ
{\displaystyle \Theta }
и т. д.).
T
=
1
ν
,
ν
=
1
T
.
{\displaystyle T={\frac {1}{\nu }},\ \ \ \nu ={\frac {1}{T}}.}
Для волновых процессов период связан кроме того очевидным образом с длиной волны
λ
{\displaystyle \lambda }
v
=
λ
ν
,
T
=
λ
v
,
{\displaystyle v=\lambda \nu ,\ \ \ T={\frac {\lambda }{v}},}
где
v
{\displaystyle v}
– скорость распространения волны (точнее – фазовая скорость).
В квантовой физике
период колебаний прямо связан с энергией (поскольку в квантовой физике энергия объекта – например, частицы – есть частота колебаний его волновой функции).
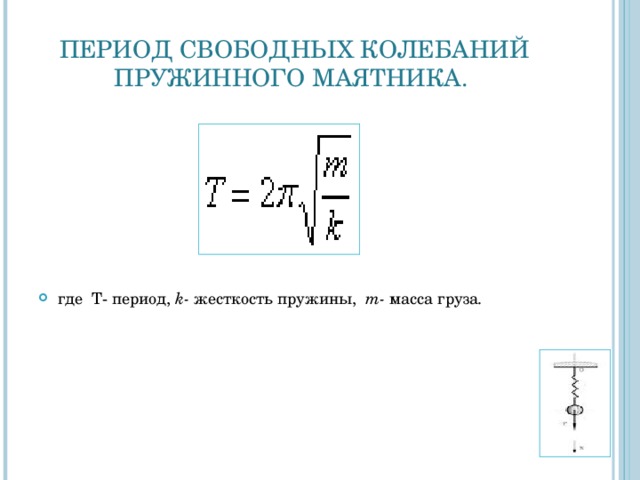
Теоретическое нахождение
периода колебаний той или иной физической системы сводится, как правило, к нахождению решения динамических уравнений (уравнения), описывающего эту систему. Для категории линейных систем (а приближенно – и для линеаризуемых систем в линейном приближении, которое зачастую является очень хорошим) существуют стандартные сравнительно простые математические методы, позволяющие это сделать (если известны сами физические уравнения, описывающие систему).
Для экспериментального определения
периода используются часы , секундомеры , частотомеры , стробоскопы , строботахометры, осциллографы . Также применяются биения, метод гетеродинирования в разных видах, используется принцип резонанса . Для волн можно померить период косвенно – через длину волны, для чего применяются интерферометры , дифракционные решетки итп. Иногда требуются и изощренные методы, специально разработанные для конкретного трудного случая (трудность могут представлять как само измерение времени, особенно если речь идет о предельно малых или наоборот очень больших временах, так и трудности наблюдения колеблющейся величины).
Гармонические колебания
Гармонические колебания – простейшие периодические колебания, при которых координата тела меняется по закону синуса или косинуса:

где \( x \) – координата тела – смещение тела от положения равновесия в данный момент времени; \( A \) – амплитуда колебаний; \( \omega t+\varphi_0 \) – фаза колебаний; \( \omega \) – циклическая частота; \( \varphi_0 \) – начальная фаза.
Если в начальный момент времени тело проходит положение равновесия, то колебания являются синусоидальными.
Если в начальный момент времени смещение тела совпадает с максимальным отклонением от положения равновесия, то колебания являются косинусоидальными.
Скорость гармонических колебаний
Скорость гармонических колебаний есть первая производная координаты по времени:

где \( v \) – мгновенное значение скорости, т. е. скорость в данный момент времени.
Амплитуда скорости – максимальное значение скорости колебаний, это величина, стоящая перед знаком синуса или косинуса:
Ускорение гармонических колебаний
Ускорение гармонических колебаний есть первая производная скорости по времени:

где \( a \) – мгновенное значение ускорения, т. е. ускорение в данный момент времени.


Амплитуда ускорения – максимальное значение ускорения, это величина, стоящая перед знаком синуса или косинуса:
Если тело совершает гармонические колебания, то сила, действующая на тело, тоже изменяется по гармоническому закону:
где \( F \) – мгновенное значение силы, действующей на тело, т. е. сила в данный момент времени.
Амплитуда силы – максимальное значение силы, величина, стоящая перед знаком синуса или косинуса:
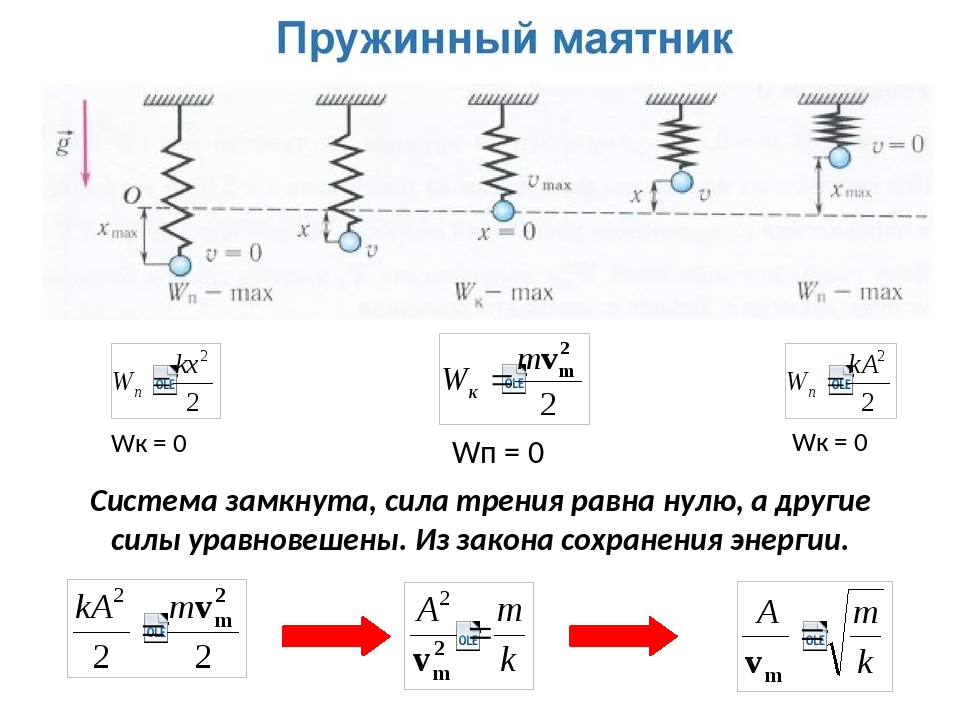
Тело, совершающее гармонические колебания, обладает кинетической или потенциальной энергией:
где \( W_k \) – мгновенное значение кинетической энергии, т. е. кинетическая энергия в данный момент времени.
Амплитуда кинетической энергии – максимальное значение кинетической энергии, величина, стоящая перед знаком синуса или косинуса:
При гармонических колебаниях каждую четверть периода происходит переход потенциальной энергии в кинетическую и обратно.
В положении равновесия:
- потенциальная энергия равна нулю;
- кинетическая энергия максимальна.
При максимальном отклонении от положения равновесия:
- кинетическая энергия равна нулю;
- потенциальная энергия максимальна.
Полная механическая энергия гармонических колебаний
При гармонических колебаниях полная механическая энергия равна сумме кинетической и потенциальной энергий в данный момент времени:

Важно!
Следует помнить, что период колебаний кинетической и потенциальной энергий в 2 раза меньше, чем период колебаний координаты, скорости, ускорения и силы. А частота колебаний кинетической и потенциальной энергий в 2 раза больше, чем частота колебаний координаты, скорости, ускорения и силы
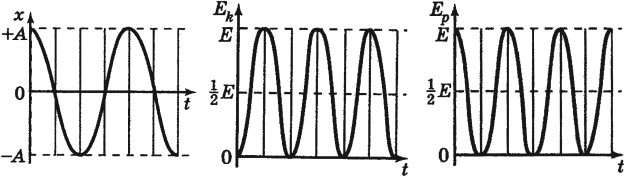
Графики зависимости кинетической, потенциальной и полной энергий всегда лежат выше оси времени.
Если сила сопротивления отсутствует, то полная энергия сохраняется. График зависимости полной энергии от времени есть прямая, параллельная оси времени (в отсутствие сил трения).
Сила упругости в пружинном маятнике
Следует учитывать тот момент, что до деформирования пружины она находится в положении равновесия. Приложенная сила может приводить к ее растягиванию и сжиманию. Сила упругости в пружинном маятнике рассчитывается в соответствии с тем, как воздействует закон сохранения энергии. Согласно принятым нормам возникающая упругость пропорциональна смещению тела. В этом случае кинетическая энергия рассчитывается по формуле: F=-kx. В данном случае применяется коэффициент жесткости пружины.
Выделяют довольно большое количество особенностей воздействия силы упругости в пружинном маятнике. Среди особенностей отметим:
- Максимальная сила упругости возникает на момент, когда тело находится на максимальном расстоянии от положения равновесия. При этом в подобном положении отмечается максимальное значение ускорение тела. Не следует забывать о том, что может проводится растягивание и сжатие пружины, оба варианта несколько отличается. При сжатии минимальная длина изделия ограничивается. Как правило, она имеет длину, равную диаметру витка умноженное на количество. Слишком большое усилие может стать причиной смещения витков, а также деформации проволоки. При растяжении есть момент удлинения, после которого происходит деформация. Сильное удлинение приводит к тому, что возникающей силы упругости недостаточно для возврата изделия в первоначальное состояние.
- При сближении тела к месту равновесия происходит существенное уменьшение длины пружины. За счет этого наблюдается постоянное снижение показателя ускорения. Все это происходит за счет воздействия усилия упругости, которая связано с типом применяемого материала при изготовлении пружины и ее особенностями. Длина уменьшается за счет того, что расстояние между витками снижается. Особенностью можно назвать равномерное распределение витков, лишь только в случае дефектов есть вероятность нарушения подобного правила.
- На момент достижения точки равновесия сила упругости снижается до нуля. Однако, скорость не снижается, так как тело движется по инерции. Точка равновесия характеризуется тем, что длина изделия в ней сохраняется на протяжении длительного периода при условии отсутствия внешнего деформирующего усилия. Точка равновесия определяется в случае построения схемы.
- После достижения точки равновесия возникающая упругость начинает снижать скорость перемещения тела. Она действует в противоположном направлении. При этом возникает усилие, которое направлено в обратную сторону.
- Дойдя крайней точки тело начинает двигаться в противоположную сторону. В зависимости от жесткости установленной пружины подобное действие будет повторятся неоднократно. Протяженность этого цикла зависит от самых различных моментов. Примером можно назвать массу тела, а также максимальное приложенное усилие для возникновения деформации. В некоторых случаях колебательные движения практически незаметны, но они все же возникают.
Приведенная выше информация указывает на то, что колебательные движения совершаются за счет воздействия упругости. Деформация происходит за счет приложенного усилия, которое может варьировать в достаточно большом диапазоне, все зависит от конкретного случая.
Презентация на тему: ” И ССЛЕДОВАНИЕ ЗАВИСИМОСТИ ПЕРИОДА КОЛЕБАНИЙ ПРУЖИННОГО МАЯТНИКА ОТ МАССЫ ГРУЗА, ЖЁСТКОСТИ ПРУЖИНЫ, АМПЛИТУДЫ КОЛЕБАНИЙ И ТЕМПЕРАТУРЫ ВОЗДУХА. Работа учащихся.” — Транскрипт:
1
И ССЛЕДОВАНИЕ ЗАВИСИМОСТИ ПЕРИОДА КОЛЕБАНИЙ ПРУЖИННОГО МАЯТНИКА ОТ МАССЫ ГРУЗА, ЖЁСТКОСТИ ПРУЖИНЫ, АМПЛИТУДЫ КОЛЕБАНИЙ И ТЕМПЕРАТУРЫ ВОЗДУХА. Работа учащихся 9 класса МОУ «Старовыслинская ООШ» Шингалова Радия и Надукова Дениса 2011г. Учитель: Потапов Н.А.
2
Ц ЕЛЬ НАШЕЙ РАБОТЫ : Исследовать зависимость периода колебаний пружинного маятника от массы груза, жёсткости пружины, амплитуды колебаний и температуры воздуха.

3
В ВЕДЕНИЕ. В настоящее время в технике и быту используются различные виды пружины. Твердые тела и материалы, которыми располагает человечество, во многом определяет уровень его технического развития. Изучая свойства твердых тел, мы заинтересовались упругими свойствами пружины и решили исследовать их.

4
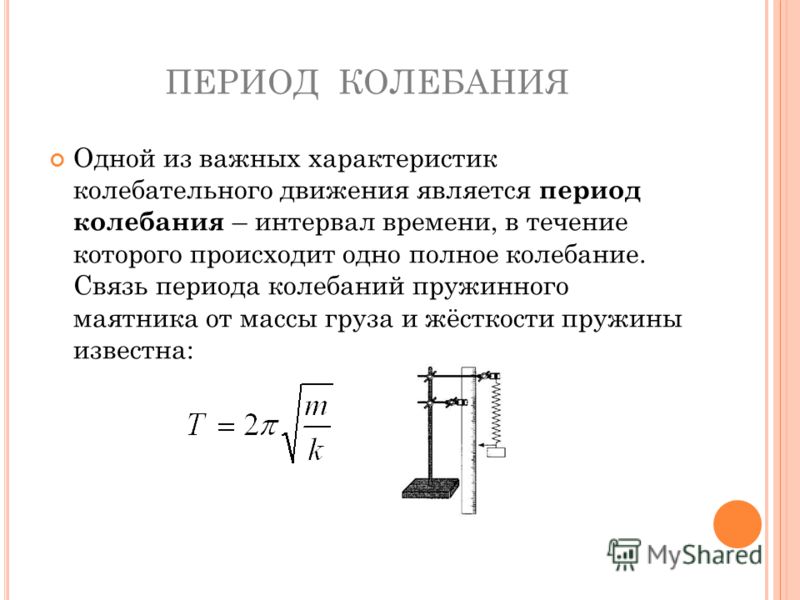
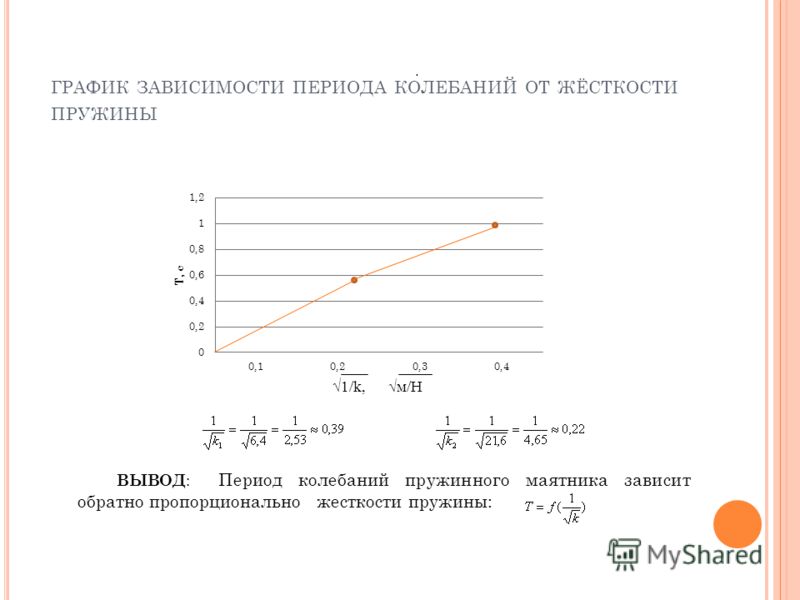
П ОДГОТОВКА К ЭКСПЕРИМЕНТУ Для проведения экспериментов подобрали следующее оборудование: штатив с 2-мя лапками, пружина 1 (к 1 =6,4 Н/м), пружина 2 (к 2 =21,6Н/м), набор грузов массой по 100г, линейка, секундомер, динамометр.

5
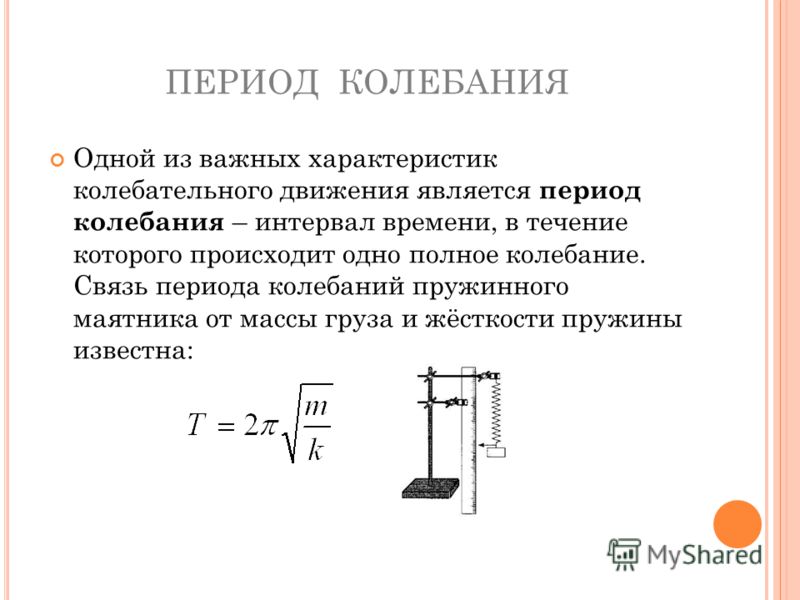
ПЕРИОД КОЛЕБАНИЯ Одной из важных характеристик колебательного движения является период колебания – интервал времени, в течение которого происходит одно полное колебание. Связь периода колебаний пружинного маятника от массы груза и жёсткости пружины известна:
6
П ЛАН ПРОВЕДЕНИЯ ЭКСПЕРИМЕНТА : Приготовить приборы и оборудования. Исследовать зависимость периода колебаний пружинного маятника от массы груза, жёсткости пружины, амплитуды и температуры воздуха. Заполнение таблиц измерений. Вычерчивание графиков зависимостей. Анализ графиков зависимостей периода от разных параметров. Обобщение результатов.






7
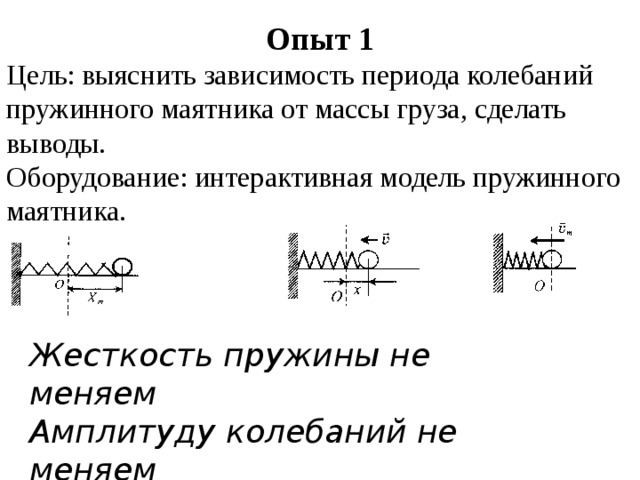
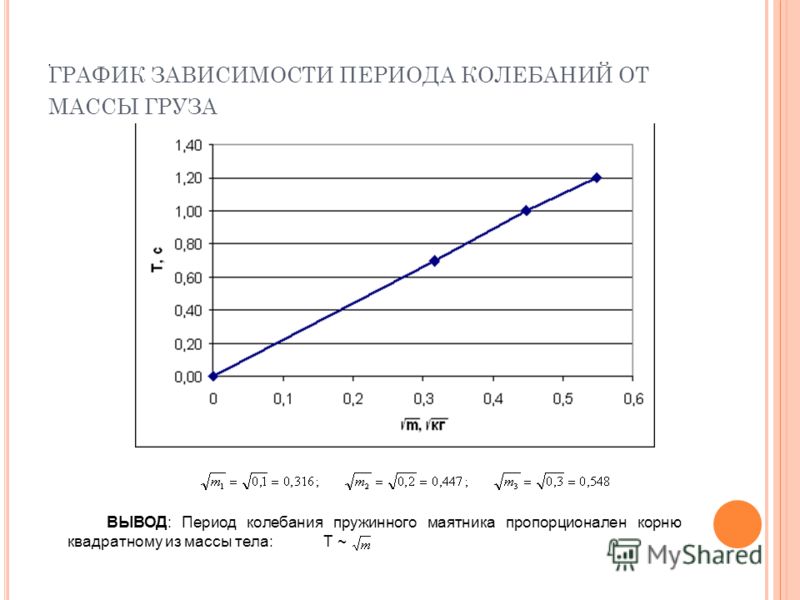
Э КСПЕРИМЕНТ 1 И ССЛЕДОВАНИЕ ЗАВИСИМОСТИ ПЕРИОДА КОЛЕБАНИЙ ПРУЖИННОГО МАЯТНИКА ОТ МАССЫ ГРУЗА. Подвесим к штативу пружину 1. Возьмем гирю массой 100г и прикрепим к пружине. С помощью секундомера определим время 10 колебаний пружинного маятника. Повторим эксперимент с гирями 200г и 300г. Определим по формуле период колебаний: Результаты измерений и вычислений запишем в таблицу 1:

8
ГРАФИК ЗАВИСИМОСТИ ПЕРИОДА КОЛЕБАНИЙ ОТ МАССЫ ГРУЗА ВЫВОД: Период колебания пружинного маятника пропорционален корню квадратному из массы тела: Т ~.
9
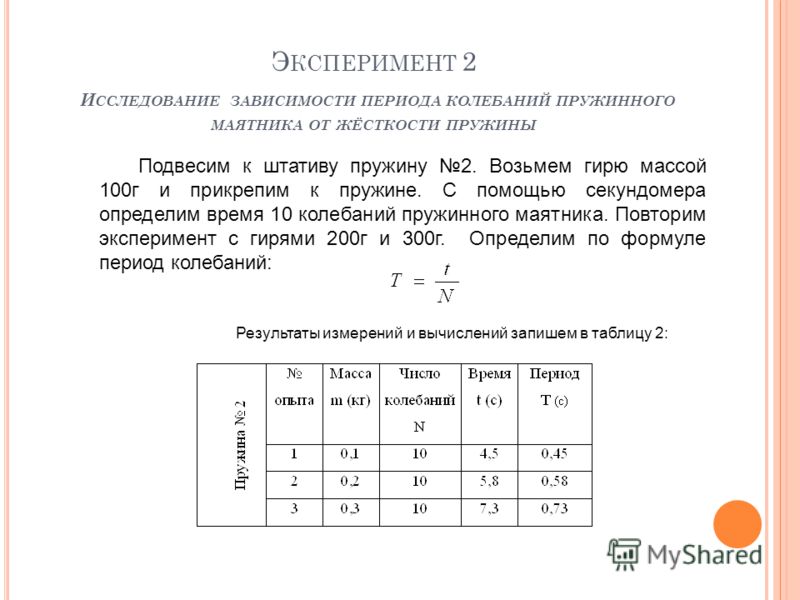
Э КСПЕРИМЕНТ 2 И ССЛЕДОВАНИЕ ЗАВИСИМОСТИ ПЕРИОДА КОЛЕБАНИЙ ПРУЖИННОГО МАЯТНИКА ОТ ЖЁСТКОСТИ ПРУЖИНЫ Подвесим к штативу пружину 2. Возьмем гирю массой 100г и прикрепим к пружине. С помощью секундомера определим время 10 колебаний пружинного маятника. Повторим эксперимент с гирями 200г и 300г. Определим по формуле период колебаний: Результаты измерений и вычислений запишем в таблицу 2:
10
ГРАФИК ЗАВИСИМОСТИ ПЕРИОДА КОЛЕБАНИЙ ОТ ЖЁСТКОСТИ ПРУЖИНЫ ВЫВОД : Период колебаний пружинного маятника зависит обратно пропорционально жесткости пружины:.
11
Э КСПЕРИМЕНТ 3 И ССЛЕДОВАНИЕ ЗАВИСИМОСТИ ПЕРИОДА КОЛЕБАНИЙ ПРУЖИННОГО МАЯТНИКА ОТ АМПЛИТУДЫ КОЛЕБАНИЙ Результаты измерений и вычислений запишем в таблицу 3: Не изменяя массы груза, жесткости пружины, установим зависимость периода колебаний от амплитуды. Повторим эксперимент 1 при разных амплитудах колебаний.

12
ГРАФИК ЗАВИСИМОСТИ ПЕРИОДА КОЛЕБАНИЙ ОТ АМПЛИТУДЫ КОЛЕБАНИЙ ВЫВОД: Эксперимент подтверждает, что период свободных колебаний пружинного маятника не зависит от амплитуды колебаний, а полностью определяется собственными характеристиками колебательной системы (жесткостью k и массой груза m).

13
Э КСПЕРИМЕНТ 4 И ССЛЕДОВАНИЕ ЗАВИСИМОСТИ ПЕРИОДА КОЛЕБАНИЙ ПРУЖИННОГО МАЯТНИКА ОТ ТЕМПЕРАТУРЫ. Для исследования зависимости периода колебаний пружинного маятника от температуры повторили эксперимент 1 во дворе школы при другой температуре ( t= -20 0С ). ВЫВОД : Период колебания пружинного маятника не зависит от температуры.

14
О БОБЩЕНИЕ В результате экспериментов мы выяснили, что период колебаний пружинного маятника зависит от массы тела, жёсткости пружины и не зависит от амплитуды колебаний и температуры.
15
Л ИТЕРАТУРА : Учебник по физике для 9 класса средней школы Н.М. Шахмаева, С.Н. Шахмаева, Д.Ш. Шодиева,-М. Просвещение.1990г. Кикоин И.К., Кикоин А.К. Физика. Учебник для 9кл.-М. Просвещение, 1990г. Громов С.В., Родина Н.А.. Физика. Учеб. Для 8кл.-М. Просвещение. 2000г. Сеть Интернет.